научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
#4 апрель 2007
УДК 621.979.15
Д.т.н. Складчиков Е.Н.,
инж. Ермишин Н.Н.
Благодаря простоте конструкции, широким технологическим возможностям, нетребовательности к специальным видам энергии электровинтовые прессы (ЭВП) находят широкое применение в промышленности как один из основных видов кузнечно-штамповочного оборудования [1,2]. Наибольшее распространение получили ЭВП с асинхронным, чаще всего дугостаторным приводом, когда статор охватывает ротор на двух угловых промежутках меньших 1800.
Недостатками ЭВП являются большие значения фазных токов, пиковый характер его изменения, низкий КПД и коэффициент мощности и, как следствие, большое потребление энергии. Эти недостатки являются следствием несоответствия свойств асинхронного привода условиям его работы, когда дважды за цикл при ходе вниз и ходе вверх привод работает в пусковом режиме. В начале как хода вниз, так и хода вверх относительное скольжение асинхронного двигателя равно единице и остается значительным в процессе разгона. Абсолютное скольжение при этом равно синхронной частоте w0 двигателя.
Одним из путей преодоления указанных недостатков является применение для питания двигателя ЭВП напряжения питания изменяемой частоты [3]. Преимущество использования частотного управления реализуется за счет понижения частоты напряжения и, соответственно, синхронной частоты двигателя w0 в начальной части разгона подвижных частей пресса с их повышением по мере разгона в опережающем режиме по отношению к скорости двигателя w. При этом многократно уменьшается скольжение асинхронного двигателя, снижаются токовые нагрузки, повышается КПД двигателя, уменьшается потребление электрической энергии.
Гибкость изменения частоты напряжения, обеспечиваемая современными частотными преобразователями, позволяет оптимизировать работу привода путем выбора законов изменения частоты питающего напряжения.
Анализ работы электровинтового пресса с частотным управлением приводом и оптимизация его работы выполнена с привлечением программного комплекса (ПК) анализа динамических систем ПА9 [4]. В качестве объекта анализа выбран ЭВП Ф1732 Чимкетского завода КПО с номинальной энергией удара 7 КДж. Конструктивная схема пресса показана на рис. 1.
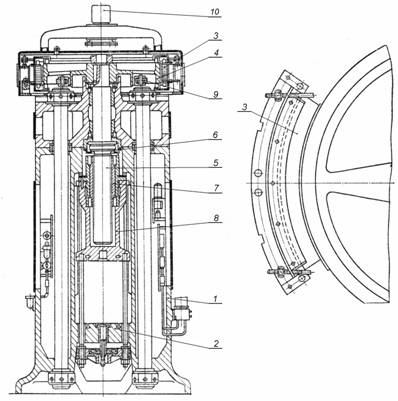
Рис. 1
Он содержит станину 1 со столом 2; асинхронный двигатель с дуговыми статорами 3, и ротором 4, являющимся одновременно маховиком; главный исполнительный механизм с винтом 5, смонтированном в двухстороннем упорном подшипнике 6, и гайкой 7, закрепленной к ползуну 8; колодочный управляемый тормоз 9, двигатель 10 вентилятора охлаждения дугостаторного двигателя и некоторые другие устройства. Маховик 4 соединен в винтом 5.
Машинный цикл работы пресса включает ход вниз, в процессе которого подвижные части пресса (маховик 4, винт 5, ползун 8) разгоняются электромагнитным моментом двигателя и силой тяжести ползуна и ход вверх, состоящий из периода разгона подвижных частей и периода торможения. При ходе вверх разгон подвижных частей осуществляется двигателем в реверсном режиме, торможение – тормозом и силой тяжести ползуна. В конце хода вниз происходит деформирование заготовки в штампе, части которого закреплены на столе 2 и ползуне 8. Деформирование осуществляется за счет расхода кинетической энергии подвижных частей, преимущественно маховика, запасенной при их разгоне вниз.
Машинный цикл работы пресса показан на рис. 2, где приведены графики изменения скорости ползуна VП, перемещения ползуна SП, частоты вращения маховика w. График последней при соответствующем выборе масштаба совпадает с графиком VП. Синхронная частота вращения двигателя - w0. На графиках цветом выделены участки, показывающие ширину зоны абсолютного скольжения двигателя w0 - w в периоды включенного состояния двигателя.
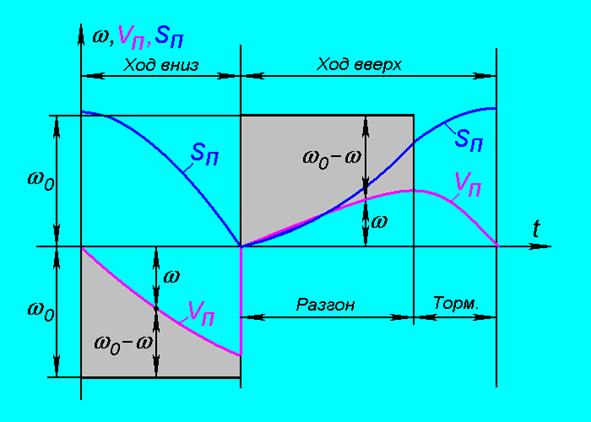
Рис. 2
Математическая модель пресса показана на рис. 3. Здесь представлена топология ЭВП в окне схемного графического редактора ПК ПА9. В таблице показано поэлементное соответствие пресса и модели. В качестве модели дугостаторного двигателя привлечена модель асинхронного двигателя серии 4А с частотным управлением. Приведение частоты вращения двигателя серии 4А (750 об/мин.) к частоте вращения дугостаторного привода (300 об/мин.) осуществлено включением в модель пресса модели зубчатого редуктора с передаточным числом 2,5, отсутствующего в конструкции ЭВП. Для исключения влияния этой модели на процессы в прессе моменты инерции элементов модели редуктора приняты равными нулю, а КПД редуктора - равным 1. Для обеспечения требуемой быстроходности пресса и улучшения энергетических показателей был выбран двигатель мощностью 30 КВт.
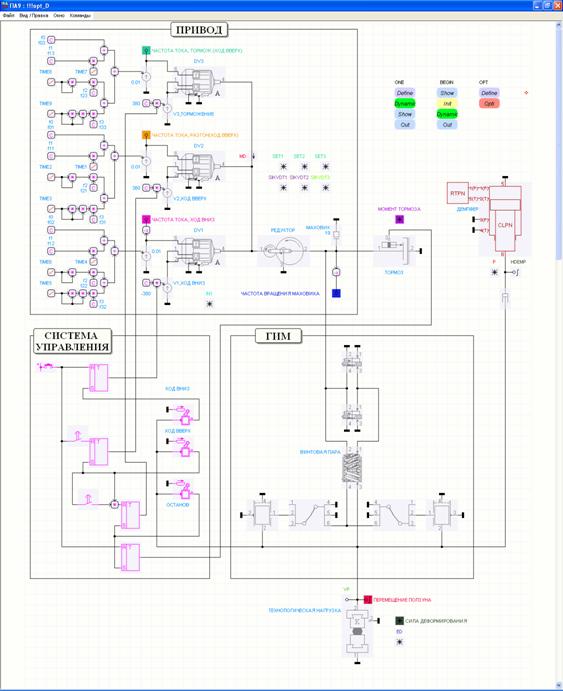
Рис. 3
Таблица
|
Номер элемента на схеме |
Элемент |
Обозначение элемента(ов) на топологии |
Имена при-влеченных моделей [4] |
|
- |
Источник питания |
V1,ХОД ВНИЗ; V2,ХОД ВЕРХ; V3,ТОРМОЖЕНИЕ |
V,f01-f33, TIME1-TIME9 |
|
2 |
Ротор-маховик |
МАХОВИК, 19 |
M |
|
3,4 |
Двигатель |
DV1-DV3, РЕДУКТОР |
DVA+RDN |
|
9 |
Тормоз |
ТОРМОЗ |
TORMOZ |
|
5,7 |
Винтовая пара |
ВИНТОВАЯ ПАРА |
VNTPR |
|
8 |
Ползун в направляю-щих |
|
BALKA2+NPR+ BALKA2+NPR |
|
6 |
Подшипник упорный двусторонний |
|
PDU,PDU |
|
1 |
Станина |
|
|
|
|
Технологическая сила |
ТЕХНОЛОГИЧЕСКАЯ НАГРУЗКА |
TNGK |
Для реализации частотного управления применен частотный трехфазный преобразователь АП-140-Ф-30К мощностью 39,4 КВт.
Частотное управление двигателем ЭВП позволяет отказаться от тормоза, используемого для остановки подвижных частей пресса в конце хода вверх. Торможение в этом случае осуществляется двигателем пресса при его работе в генераторном режиме работы параллельно с сетью. При этом имеет место рекуперация кинетической энергии подвижных частей пресса, которую они накапливают в конце разгона при ходе вверх. Это дополнительно улучшает энергетические показатели работы пресса, а также позволяет исключить из конструкции пресса быстроизнашиваемые элементы – фрикционные накладки тормоза. При этом тормоз сохраняет свою функцию удержания подвижных частей пресса от самопроизвольного их движения в паузах работы пресса.
Асинхронный двигатель в модели пресса представлен тремя моделями двигателя. Они представляют один двигатель и воспроизводят его работу в периоды разгона вниз, разгона вверх, торможения. Каждая из трех моделей имеет свои элементы задания закона изменения частоты напряжения (f01-f32, TIME1-TIME9).
Закон изменения частоты питающего напряжения задется полиномом третьего порядка с коэффициентами полинома f0, f1, f2, f3. Для каждого из периодов: разгон вниз, разгон вверх, торможение при ходе вверх задается свой закон изменения частоты напряжения со своими коэффициентами полинома. Они приняты в качестве управляемых параметров при оптимизации. Критерий оптимизации – затраты энергии.
Оптимизация осуществлялась методом Нелдера и Мида. Были найдены оптимальные законы изменения частоты напряжения с коэффициентами полиномов: для хода вниз f0=0,153, f1=1,9, f2=0,265, f3=0,018; для хода разгона вверх f0=0,182, f1=0,595, f2=0,140, f3=0,006; для хода торможения при ходе вверх f0=0,88, f1=-0,80, f2=-0,66, f3=0,0;
Результаты моделирования пресса с оптимальным частотным управлением показаны на рис. 4.
Цикл работы пресса для случая оптимального закона частотного управления работой двигателя показан также на рис. 5. Как видно из рисунка, частотное управление позволяет значительно сузить зоны, определяющие скольжение двигателя на всех этапах его работы (см. рис. 2).
Затраты энергии на один ход, при эффективной энергии 7 кДж, уменьшились за счет применения частотного управления с 59.2 до 31.38 КДж, т.е. - в 1.9 раза.
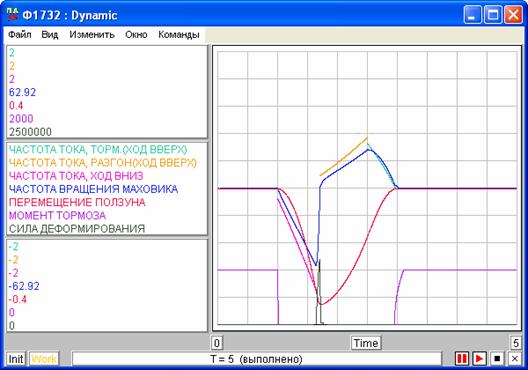
Рис. 4
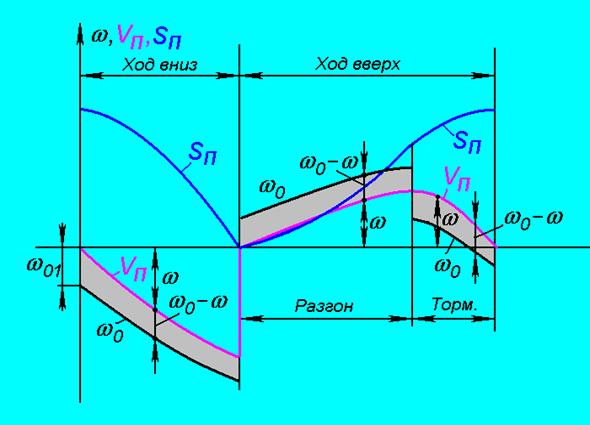
Рис. 5
В исходном варианте эквивалентный ток [5] в конце цикла превышал номинальный в 1.5 раза, что говорит о напряженном тепловом режиме работы электродвигателя. В найденном варианте эквивалентный ток составил 83% номинального тока. Это позволяет отказаться от вентилятора и двигателя для его привода мощностью 1,3 КВт, что является дополнительным источником экономии энергии.
Частотное управление позволяет форсировать работу пресса с увеличением энергии деформирования против требуемой ГОСТом. Моделированием
найдено, что на прессе модели Ф1732 можно получить энергию деформирования 13 КДж.
Литература
1. Бочаров Ю.А. Винтовые прессы. М.: Машиностроение, 1976.
2. Ковка и штамповка: Справочник. В 4-х т. - М.:Машиностроение, Т.2. /Под ред. Е.И.Семенова, 1986.
3. Сандлер А.С., Сарбатов Р.С. Автоматическое частотное управление асинхронными двигателями. М., Энергия, 1974.
4. Живов Л.И., Овчинников А.Г., Складчиков Е.Н. Кузнечно-штампо-вочное оборудование. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2006.
5. Электрооборудование кузнечно–прессовых машин: Справочник/ В.Е.Стоколов, Г.С.Усышкин, В.М.Степанов и др. –М.: Машиностроение, 1981.
Публикации с ключевыми словами: математическое моделирование, привод, оптимизация, электровинтовой пресс, скольжение асинхронного двигателя, экономия электроэнергии
Публикации со словами: математическое моделирование, привод, оптимизация, электровинтовой пресс, скольжение асинхронного двигателя, экономия электроэнергии
Смотри также:
- Возможности применения параллельных методов вычисления в системе программирования на языке S-FLOGOL
- Разработка программной среды для моделирования и оптимизации складской политики двухэшелонных многопродуктовых цепей поставки
- Математическая модель взаимодействия предприятий по производству продуктов питания молочной отрасли АПК РФ
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||