научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 05, май 2013
DOI: 10.7463/0513.0547989
УДК 531.383
Россия, МГТУ им. Н.Э. Баумана
Введение
Создание сверхпроводниковых магнитных подшипников (СМП), основанных на взаимодействии объемных высокотемпературных сверхпроводников (ВТСП) с магнитным полем, является одним из перспективных направлений в развитии современной техники. Сверхпроводниковый магнитный подшипник осуществляет устойчивую стабилизацию ротора и не требует сложной электронной аппаратуры и смазывающих веществ, что заметно упрощает их эксплуатацию и повышает время безотказнойработы. Исследования в этой области интенсивно развиваются благодаря значительным успехам технологии получения ВТСП материалов. К настоящему моменту в научных центрах Германии, США, Японии разработан ряд конструкций магнитных опор, предназначенных для использования в маховиковых накопителях с большим диаметром ротора с нагрузочной способностью до 10000 Н, в электромоторах, электрогенераторах, центрифугах [1-3].
На настоящий момент разработано несколько конструкций СМП, отличающихся конфигурацией магнитного поля, взаимным расположением постоянных магнитов (ПМ) и ВТСП элементов, а также способом активации сверхпроводниковых элементов – при наличии (FC) или при отсутствии магнитного поля (ZFC). Общим же для них является наличие одного взаимодействия, обеспечивающего стабилизацию ротора взаимодействие ПМ-ВТСП [4-6].
В отличие от известных технических решений, в предлагаемой конструкции СМП центрирование и стабилизация ротора по пяти степеням свободы обеспечивается комбинацией двух силовых взаимодействий: радиальная стабилизация и самоцентрирование ротора осуществляются взаимодействием постоянный магнит - постоянный магнит (ПМ); осевая стабилизация - взаимодействием постоянного магнита со сверхпроводником, активируемым в отсутствии магнитного поля. Комбинированная система стабилизации ротора обеспечивает его самоцентрирование и радиальную стабилизацию без предварительной выставки, что улучшает технологичность сборки и упрощает эксплуатацию, так как ротор расположен вне зоны охлаждения и не подвержен воздействию низких температур. Известно также, что охлаждение на первоначальном этапе активации ВТСП элементов вне магнитного поля по сравнению с их
охлаждением в магнитном поле способствует значительному повышению силы левитации при последующем взаимодействии ВТСП элементов с ПМ.
1. Конструкция подшипника
Конструктивная схема подшипника со схемой распределения сил, действующих на ротор, приведена на рисунке 1. Подшипник включает ротор с кольцевыми центральными и периферийными магнитами и две пластины статора с центральными кольцевыми магнитами и периферийными сверхпроводниковыми элементами. Направление намагничивания центральных магнитов статора и ротора направлено в одну сторону и они, следовательно, притягиваются друг к другу – осевые силы Fос. При смещении ротора в радиальном направлении на величину DS под действием силы F на него действует возвращающая сила Fрад, которая является компонентой сил F1 и F3. Она осуществляет радиальную стабилизацию и самоцентрирование ротора. Периферийные магниты ротора и ВТСП элементы статора при сближении взаимно отталкиваются (силы F2 и F4, уравнивают взаимное притяжение центральных магнитов ротора и статора и, таким образом, реализуют осевую стабилизацию ротора). Реализация раздельных систем стабилизации позволяет гибко регулировать соотношение радиальных и осевых нагрузочных и жесткостных характеристик подшипника в зависимости от требований эксплуатации.
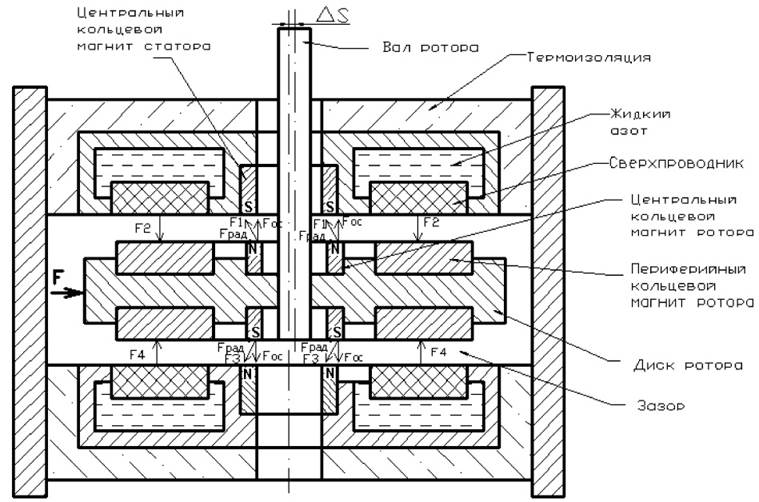
Рис. 1. Конструктивная схема подшипника с комбинированной системой стабилизации и схема сил взаимодействия между ротором и статором
Сборка подшипника отличается хорошей технологичностью. Вначале ВТСП элементы статорных пластин охлаждаются до рабочей температуры посредством жидкого азота или криокулера, затем над нижней охлажденной пластиной статора размещают ротор, который левитирует и самоцентрируется без дополнительных приспособлений на высоте 7-10 мм. Далее над ротором размещается вторая охлажденная половина статора, которая также левитирует над ротором и самоцентрируется. После чего нижняя и верхняя половины статора жестко соединяются шпильками и стягиваются, задавая некоторое начальное расстояние между поверхностями ротора и статора (начальный зазор). Он необходим в силу того, что при больших зазорах (более 3 мм) крутизна изменения силы отталкивания между ВТСП и магнитами (жесткость) заметно меньше, чем при малых зазорах (менее 2 – 3 мм), и радиальная жесткость также возрастает при уменьшении зазора. После проведения данных операций подшипник готов к работе. Существенным положительным моментом является то, что ротор находится вне зоны охлаждения ВТСП. Подшипник может эксплуатироваться, как в горизонтальном, так и в вертикальном положении.
В случае, если по условиям эксплуатации ось подшипника расположена вертикально и он нагружается в основном в осевом направлении, то есть находится под воздействием массы ротора, возможен вариант конструкции, когда сверхпроводники на верхней части статора подшипника отсутствуют. В этом случае осевые силы притяжения между центральными магнитами ротора и нижней и верхней половин статора будут в основном компенсироваться и нагрузочная способность будет определяться только силой отталкивания между периферийными магнитами ротора и сверхпроводниками нижней части статора. Она будет больше, чем в обычном варианте, так как взаимодействие между верхними периферийными магнитами ротора и сверхпроводниками статора (сила F2) будет отсутствовать. В то же время радиальная нагрузочная характеристика, определяемая взаимодействием только центральных кольцевых магнитов, останется прежней. Таким способом можно заметно увеличить нагрузочную способность подшипника работающего в качестве опорного.
2. Расчет нагрузочных характеристик ВТСП подшипников с различными конфигурациями магнитной системы
Нагрузочные и жесткостные характеристики подшипника определяются конфигурацией и размерами его магнитной системы, состоящей из центральных кольцевых магнитов, периферийных кольцевых магнитов и сверхпроводниковых элементов.
С целью определения оптимальной конструкции подшипника проведены расчеты силовых и жесткостных характеристик различных вариантов, отличающихся конфигурацией магнитной системы, размерами кольцевых постоянных магнитов (ПМ), направлением их намагничивания и количеством полюсов (число колец постоянных магнитов).
Разработан метод расчета магнитных систем, включающих элементы высокотемпературных сверхпроводников, постоянные магниты и магнитную арматуру, выполненную из магнитомягкого материала. Расчет строится относительно формальных источников поля, анализируемых на макроскопическом уровне. Совокупность таких источников, заключенных в объеме элемента системы, составляет основу его математической модели. Для расчетов электромагнитного поля в магнитных системах применен метод пространственных интегральных уравнений для источников поля: объемной плотности токов J,плотностей зарядов ξ и векторов намагниченности ферромагнитных деталей M. Высокотемпературный сверхпроводящий материал представлен нелинейной анизотропной электропроводящей средой. Для численного расчета непрерывные распределения в пространстве намагниченности, токов и зарядов представлены их кусочно-постоянными аппроксимациями по малым элементарным объемам. При построении метода расчета использованы наиболее развитые модели нелинейных электрофизических свойств ВТСП материала [7]. На основе предложенного метода разработан алгоритм расчета, компьютерные программы для расчета распределения напряженности магнитного поля в рабочем зазоре подшипника и его нагрузочных характеристик.
Расчеты проведены для четырех вариантов подшипника.
Магнитная система варианта № 1 (рисунок 2) имеет единичные центральные кольцевые магниты на статоре и единичные периферийные кольцевые магниты на роторе (однополюсная система).
Вариант № 2 (рисунок 3) отличается от варианта № 1, увеличенными размерами центральных и периферийных магнитов.
Вариант № 3 (рисунок 4) содержит парные концентрически расположенные центральные и периферийные магниты.
Вариант № 4 (рисунок 5) имеет компоновку аналогичную варианту № 3, но отличающийся увеличенными размерами магнитов.
Для всех предложенных вариантов рассчитаны возвращающие силы от осевых и радиальных нагрузок при начальных зазорах между ротором и статором 2, 1.5, 1.0 и 0,5 мм и определены значения жесткости. Радиальные и осевые нагрузочные характеристики представлены на рисунках 6-13. Нагрузочные характеристики имеют в основном линейный характер, за исключением варианта № 2 при зазоре 0,5 мм, где наблюдается преобладание силы притяжения центральных магнитов над силой отталкивания между периферийными магнитами и сверхпроводниками.


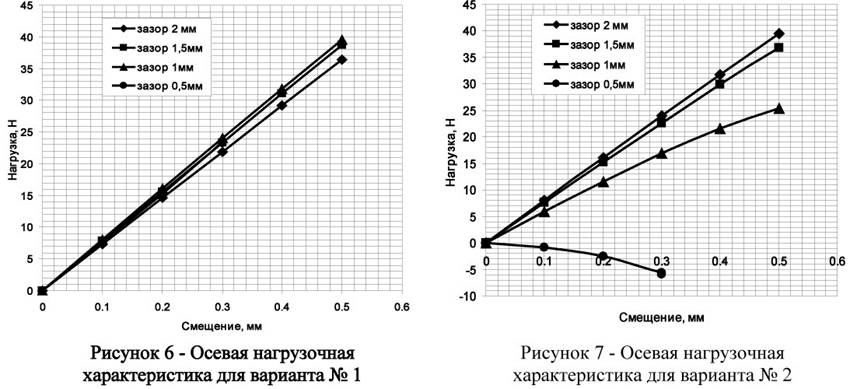

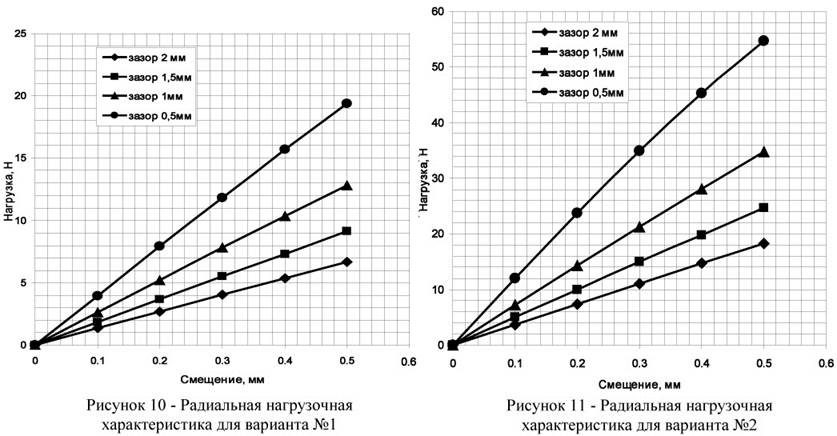

Вариант конструкции № 1 с единичными центральными и периферийными магнитами имеет низкие нагрузочные характеристики: осевая нагрузочная способность 40 Н, радиальная – 20 Н при смещении ротора на 0,5 мм. Увеличение размеров магнитов в варианте № 2 приводит к увеличению радиальной характеристики в 2,8 раза до 56 Н, но практически не влияет на осевую. Варианты конструкции № 3 и № 4 имеют наилучшие характеристики, что достигается использованием двухполюсных центральных и периферийных магнитов. В этом случае радиальная сила возрастает, как за счет увеличения количества магнитов, так и за счет отталкивания соседних кольцевых магнитов. Осевая сила возрастает за счет уменьшения рассеяния магнитного поля периферийных магнитов. Осевая и радиальная нагрузочная способность и жесткость возрастают в 2-3 раза в сравнении с вариантами № 1 и № 2 и составляют 140 Н и 111 Н соответственно, при высоких значениях жесткости – 313 Н/мм в осевом направлении и 227 Н/мм в радиальном. Расчетные значения жесткости для всех вариантов конструкции приведены на рисунках 14 и 15. Видно, что их наиболее оптимальные значения имеют конструкции № 3 и № 4.
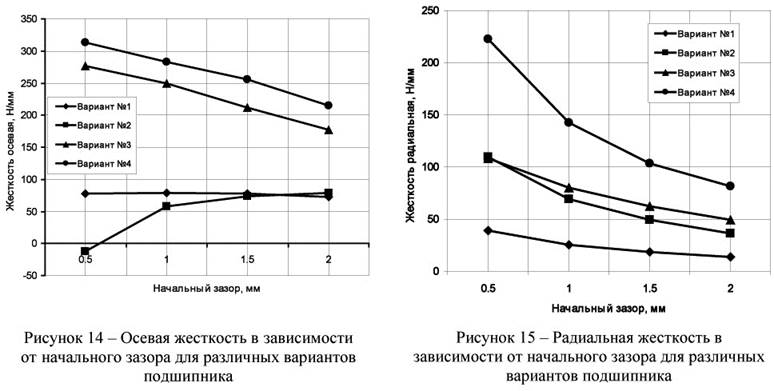
Таким образом, данные расчета силовых и жесткостных характеристик показывают, что из рассчитанных наиболее оптимальными конструкциями являются многополюсные магнитные системы, отличающиеся максимальными значениями нагрузочных и жесткостных характеристик. Предлагаемая конструкция подшипника с комбинированной стабилизацией ротора и активацией ВТСП в режиме ZFC при сопоставимых размерах и одинаковых смещениях ротора, позволяет увеличить характеристики практически в два раза: нагрузочную способность – со 110 Н до140 Н и жесткость с 270 Н/мм до 313 Н/мм, по сравнению с разработанным нами подшипником с активацией ВТСП в режиме FC, имеющем нагрузочные характеристики 60…75 Н, и жесткость –140…190 Н/мм.
Анализируя полученные расчетные данные можно сделать вывод, что повышение нагрузочных характеристик можно достичь, увеличивая размеры и число полюсов магнитов. При этом необходимо также увеличивать размер сверхпроводниковых элементов. Такой подход коррелирует с данными работы [3], в которой исследовалось силовое взаимодействие между диском с четырьмя концентрическими кольцевыми магнитами, максимальный диаметр которых составлял 620 мм, а минимальный – 320 мм, и десятью ВТСП дисками диаметром 150 мм, имеющих крупнокристаллическую структуру. Температура охлаждения ВТСП при этом составляла 65 К. Диск левитировал под нагрузкой 10000 Н при зазоре 7,5 мм, однако, не обладал нагрузочной способностью в радиальном направлении, в отличие от разработанного нами. Кроме того, используемые нами ВТСП элементы представляют собой квазимонокристаллы, которые по своим магнитным характеристикам значительно превосходят использованные в упомянутой работе крупнокристаллические материалы. Таким образом, нагрузочные характеристики в несколько десятков тысяч ньютон для данного типа подшипника являются вполне достижимыми.
3. Экспериментальная апробация
Для подтверждения работоспособности концепции предлагаемой конструкции подшипника изготовлена модель элемента подшипника с двухполюсными периферийными магнитами. Сверхпроводниковые элементы изготовлены на основе разработанной нами ранее технологии, представленной в работе [8]. Проведен предварительный эксперимент. После охлаждения ВТСП элементов статора в режиме ZFC наблюдалось самоцентрирование и устойчивая левитация вращающегося ротора на высоте 6 мм над статором (рисунок 16).
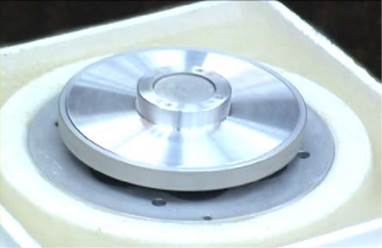
Рис. 16
Заключение
Предложена новая конструкция бесконтактного магнитного подшипника с использованием высокотемпературных объемных сверхпроводников. В ее основе лежат два силовых взаимодействия: (1) сила притяжения между кольцевыми центральными магнитами статора и ротора, обеспечивающая радиальную стабилизацию и самоцентрирование ротора, и (2) сила отталкивания между периферийными кольцевыми магнитами ротора и сверхпроводниковыми элементами, расположенными на статоре. Проведен расчет силового взаимодействия ротора и статора для различных конструктивных вариантов магнитной системы подшипника. Лучшие характеристики соответствуют многополюсным вариантам магнитной системы подшипника, когда она включает два и более кольцевых и периферийных магнитов. Проведена экспериментальная апробация принципа действия данной конструкции подшипника, подтверждающая ее работоспособность.
Список литературы
1. Matveev V., Nizhelskiy N., Poluschenko O. Force and stiffness characteristics of supeconducting bearing prototype // Physica C: Superconductivity. 2004. Vol. 416, no. 1-2. P. 17-24. http://dx.doi.org/10.1016/j.physc.2004.09.001
2. Матвеев В.А. и др. Бесконтактная радиально-упорная опора на высокотемпературных сверхпроводниках: пат. № 2270940 РФ. 2006.
3. Walter H., Bock J., Frohne Ch., Schippl K., May H., Canders W.R., Kummeth P., Nick W., Neumueller H.-W. First Heavy Load Bearing for Industrial Application with Shaft Loads up to 10 kN // Journal of Physics: Conference Series. 2006. Vol. 43. P. 995-998. doi:10.1088/1742-6596/43/1/243
4. Полущенко О.Л., Нижельский Н.А., Сысоев М.А. Роторная система с опорами на основе объемных высокотемпературных сверхпроводников (ВТСП) // Известия ВУЗов. Машиностроение. 2011. № 3. С. 59-66.
5. Polushchenko O.L., Nizhelskiy N.A., Matveev V.A., Gerdi V.N. Prototype of a Disc-Type HTS Bearing // Physics Procedia. 2012. Vol. 36. P. 1014-1019. http://dx.doi.org/10.1016/j.phpro.2012.06.098
6. Магнитные бесконтактные подшипники с использованием объемных ВТСП элементов / О.Л. Полущенко, Н.А. Нижельский, В.А. Матвеев, В.А. Маевский, М.М. Сухарев, В.А. Лыхин // Сборник трудов 3–й международной конференции «Фундаментальные проблемы высокотемпературной сверхпроводимости». 2008. С. 280-281.
7. Грибанов С.В., Кулаев Ю.В., Курбатов П.А., Матвеев В.А., Нижельский Н.А., Полущенко О.Л. Расчет магнитных систем с элементами из высокотемпературных сверхпроводящих материалов // Электричество. 2009. № 2 .С. 51-57.
8. Nizhelskiy N.A., Poluschenko O.L., Matveev V.A. Employment of Gd–Ba–Cu–O elongated seeds in top-seeded melt-growth processing of Y–Ba–Cu–O superconductors // Superconductor Science and Technology. 2007. Vol. 20, no. 1. P. 81-86. http://dx.doi.org/10.1088/0953-2048/20/1/015
Публикации с ключевыми словами: постоянный магнит, подшипник, высокотемпературные сверхпроводники, ВТСП, нагрузочная способность, силовые и жесткостные характеристики
Публикации со словами: постоянный магнит, подшипник, высокотемпературные сверхпроводники, ВТСП, нагрузочная способность, силовые и жесткостные характеристики
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||