электронный научно-технический журнал
ИНЖЕНЕРНЫЙ ВЕСТНИК
Издатель: Общероссийская общественная организация "Академия инженерных наук им. А.М. Прохорова".
Инженерный вестник # 07, июль 2012
УДК 519.673
Россия, МГТУ им. Н.Э. Баумана
lm_skvo@rambler.ru
Рассмотрена методика построения математических моделей электрических цепей в виде структурных схем, состоящих из типовых блоков, соединенных между собой направленными линиями связи. Построенная таким образом модель имеет вид принципиальной электрической схемы. Рассматриваются модели электрических цепей и их элементов, реализованные в программном комплексе "МВТУ".
Ключевые слова: электрические цепи, структурные схемы, математическое моделирование, комплексы программ.
1. Введение
Сложный технический объект содержит элементы разной физической природы (механические, электрические, гидравлические и т.д.). При проектировании таких объектов широко используется представление математических моделей в виде структурных схем, состоящих из типовых блоков, соединенных между собой направленными линиями связи. Каждый блок реализует определенную функциональную зависимость выходных переменных от входных переменных. Использование вложенных структур (макроблоков) позволяет в удобном и наглядном виде описывать сложные модели, содержащие сотни и даже тысячи элементарных блоков. Структурные схемы удобны и при решении задач анализа и синтеза систем автоматического управления.
Структурное представление математической модели применяется во многих программных продуктах (Simulink, VisSim, "МВТУ" и др.), предназначенных для моделирования самых различных объектов. Практически любой современный технический объект содержит электротехнические и электронные устройства. Необходимым этапом построения модели такого объекта является формирование уравнений по принципиальной электрической схеме. Для сложных цепей формирование уравнений является трудоемким процессом, поэтому этот этап должен быть автоматизирован.
Некоторые программные комплексы (ПК) структурного моделирования содержат специальные библиотеки моделей элементов электрических цепей. Пакет Simulink, входящий в состав системы MATLAB, содержит библиотеку блоков SymPowerSystems, предназначенную для построения моделей электротехнических устройств [1]. ПК "МВТУ" [2–5] также содержит набор блоков, позволяющий строить модели электрических цепей. В отличие от Simulink, в ПК "МВТУ" такие блоки строятся на основе уже существующих типовых блоков. Благодаря этому модель становится предельно открытой и наглядной. Т.е. можно посмотреть внутреннее устройство любого элемента цепи, внести изменения, а также самому построить нужную модель из типовых блоков.
В статье рассмотрены принципы построения моделей электрических цепей в ПК "МВТУ". Элементами этих моделей являются двухполюсные компоненты (источники напряжения и тока, сопротивления, емкости, индуктивности), а также соединения (узлы и заземления). Из этих элементов можно построить более сложные модели, например, модель трансформатора или транзистора. Модель электрической цепи строится на основе метода контурных токов и состоит из двухполюсных компонентов, соединений и линий связи. Линии связи между элементами обозначают проводники. Каждая линия передает векторный сигнал, первый компонент которого – напряжение, а второй – ток.
2. Модели двухполюсных элементов
Все элементы электрической цепи в ПК "МВТУ" являются замаскированными макроблоками, т.е. блоками с внутренней структурой, на которые наложены изображения соответствующих элементов. Каждый двухполюсный элемент имеет один векторный вход и один векторный выход. Кроме этого, управляемые источники напряжения или тока имеют скалярный вход, задающий значение напряжения или тока. Направление тока внутри элемента принимается от его входа к выходу. Обозначим через ![]() и
и ![]() напряжения на входе и на выходе двухполюсника, а через
напряжения на входе и на выходе двухполюсника, а через ![]() протекающий через него ток. Приведем уравнения и структурные схемы основных элементов.
протекающий через него ток. Приведем уравнения и структурные схемы основных элементов.
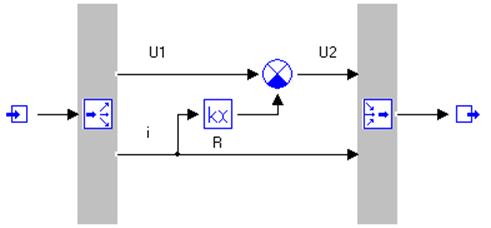
Рис. 1. Модель сопротивления
Уравнения элемента "Сопротивление" формируются на основе закона Ома и имеют вид
![]() .
.
Внутренняя структура макроблока, реализующего эту модель, приведена на рис. 1. Величина сопротивления R задается в окне параметров макроблока. Вход и выход задаются с помощью входного порта 1 и выходного порта 2. Блок "Демультиплексор" расщепляет векторный входной сигнал на два скалярных сигнала (![]() и
и ![]() ). Усилитель с коэффициентом
). Усилитель с коэффициентом ![]() формирует падение напряжения
формирует падение напряжения ![]() , а блок "Мультиплексор" объединяет скалярные сигналы
, а блок "Мультиплексор" объединяет скалярные сигналы ![]() и
и ![]() в один векторный выходной сигнал.
в один векторный выходной сигнал.
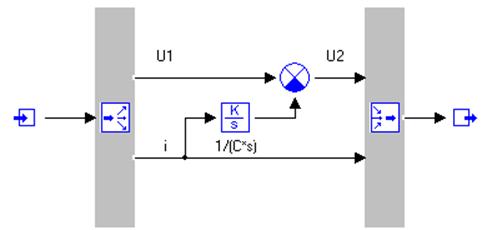
Рис. 2. Модель емкости
Уравнения элемента "Емкость" запишутся в виде
 .
.
Параметрами являются величина емкости ![]() и начальное падение напряжения
и начальное падение напряжения ![]() . Реализованная в ПК "МВТУ" модель показана на рис. 3 и отличается от модели сопротивления только тем, что вместо блока "Усилитель" стоит блок "Интегратор".
. Реализованная в ПК "МВТУ" модель показана на рис. 3 и отличается от модели сопротивления только тем, что вместо блока "Усилитель" стоит блок "Интегратор".
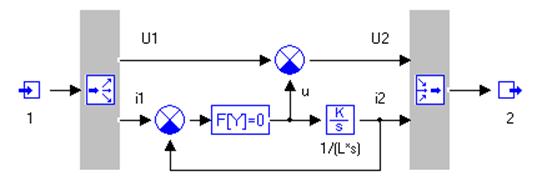
Рис. 3. Модель индуктивности
Элемент "Индуктивность" реализуется с использованием типового блока "F(Y)=0", который обеспечивает формирование системы алгебраических уравнений. При решении этих уравнений выходы всех таких блоков определяются из условия обеспечения нулевых сигналов на их входах (аналогичный блок в пакете Simulinkназывается "AlgebraicConstrain"). Уравнения индуктивности можно записать в виде
 ,
,
где ![]() – величина индуктивности,
– величина индуктивности, ![]() – начальный ток,
– начальный ток, ![]() и
и ![]() – ток на входе и на выходе. Структурное представление этих уравнений показано на рис. 3.
– ток на входе и на выходе. Структурное представление этих уравнений показано на рис. 3.
Приведем теперь модели источников напряжения и тока. Независимый источник напряжения описывается уравнением
![]() ,
,
где ![]() – напряжение источника в зависимости от модельного времени. Структура источника напряжения представлена на рис. 4. Для задания напряжения источника используется типовой блок "Язык программирования", позволяющий определять функцию блока в виде программы на встроенном паскале-подобном языке ПК "МВТУ" (см. [2–5]). Например, для источника переменного напряжения, который включается в момент модельного времени
– напряжение источника в зависимости от модельного времени. Структура источника напряжения представлена на рис. 4. Для задания напряжения источника используется типовой блок "Язык программирования", позволяющий определять функцию блока в виде программы на встроенном паскале-подобном языке ПК "МВТУ" (см. [2–5]). Например, для источника переменного напряжения, который включается в момент модельного времени ![]() , программа такого блока имеет вид
, программа такого блока имеет вид
if time<t0 then E=0 else E=Em*sin(2*pi*Freq*time);
outputE;
(здесь time – модельное время, Em – амплитуда, Freq – частота в герцах).
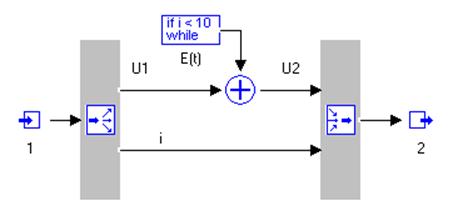
Рис. 4. Модель независимого источника напряжения
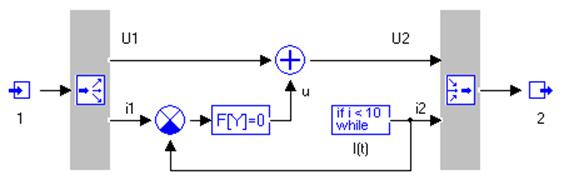
Рис. 5. Модель независимого источника тока
Независимый источник тока описывается уравнениями
![]() ,
,![]()
а его структурная схема приведена на рис. 5.
Модели управляемых (зависимых) источников строятся аналогично. Нужно только блок "Язык программирования" заменить на блок "Порт входа". В этом случае на изображении источника появится второй (скалярный) входной порт, который используется для задания величины напряжения или тока.
3. Модели нелинейных элементов
Мы рассмотрели основные элементы электрических цепей, которые описываются линейными уравнениями. С помощью этих элементов можно реализовать несложные цепи, но более сложные цепи обычно содержат нелинейные элементы, важнейшими из которых являются полупроводниковые приборы. Рассмотрим различные способы построения моделей нелинейных элементов на примере различных моделей полупроводникового диода.
Проще всего реализовать модель нелинейного сопротивления, которая описывается функциональной зависимостью ![]() , определенной для всех действительных
, определенной для всех действительных ![]() . Отличие от модели линейного сопротивления состоит только в том, что усилитель с характеристикой
. Отличие от модели линейного сопротивления состоит только в том, что усилитель с характеристикой ![]() заменен блоком, реализующим нелинейную функцию. Для реализации этой функции можно использовать нелинейные типовые блоки, но если зависимость достаточно сложная, то удобнее всего использовать блок "Язык программирования".
заменен блоком, реализующим нелинейную функцию. Для реализации этой функции можно использовать нелинейные типовые блоки, но если зависимость достаточно сложная, то удобнее всего использовать блок "Язык программирования".
В качестве примера рассмотрим простейшую модель диода, которая описывается кусочно-линейной зависимостью
где ![]() и
и ![]() – величина сопротивления в обратном и в прямом направлении. Такая характеристика реализуется в блоке "Язык программирования" в виде программы
– величина сопротивления в обратном и в прямом направлении. Такая характеристика реализуется в блоке "Язык программирования" в виде программы
input i;
if i<0 then u=R1*i else u=R2*i;
outputu;
В некоторых случаях характеристика нелинейного элемента задается в виде зависимости тока от напряжения, т.е. в виде ![]() . Например, модель диода, построенная на основе физических процессов в p-n-переходе, задается формулой
. Например, модель диода, построенная на основе физических процессов в p-n-переходе, задается формулой
![]() ,
,
где ![]() – обратный ток,
– обратный ток, ![]() – потенциал перехода. Для реализации подобных зависимостей можно использовать два способа.
– потенциал перехода. Для реализации подобных зависимостей можно использовать два способа.
Во-первых, можно попытаться найти в аналитическом виде обратную зависимость (![]() от
от ![]() ), а затем использовать полученную формулу в модели нелинейного сопротивления. Однако такой способ может оказаться неприменимым, даже если искомую формулу удалось найти. Например, для модели диода получим обратную зависимость в виде
), а затем использовать полученную формулу в модели нелинейного сопротивления. Однако такой способ может оказаться неприменимым, даже если искомую формулу удалось найти. Например, для модели диода получим обратную зависимость в виде
![]() .
.
Эта функция не определена при ![]() , и при итерационном решении уравнений значение
, и при итерационном решении уравнений значение ![]() может оказаться недопустимым. Поэтому при попытке промоделировать схему, содержащую такой элемент, скорее всего будет выдано сообщение: "Ошибка: Аргумент вне области определения функции".
может оказаться недопустимым. Поэтому при попытке промоделировать схему, содержащую такой элемент, скорее всего будет выдано сообщение: "Ошибка: Аргумент вне области определения функции".
Второй способ более универсален и заключается в формировании модели нелинейной проводимости, которая задается уравнениями
![]() .
.
Структурная схема, реализующая эти уравнения, имеет такой же вид, как в модели индуктивности на рис. 3, только вместо интегратора нужно поставить блок, реализующий функцию ![]() .
.
Зависимость напряжения от тока (или тока от напряжения) не всегда является однозначно определенной и может выражаться в виде
![]() .
.
Простейший пример – модель идеального диода, который имеет нулевое сопротивление в прямом направлении и бесконечное сопротивление в обратном направлении. Для такой модели можно записать
![]() .
.
Более сложные примеры – модель тоннельного диода, а также различные модели гистерезисного типа. Уравнения подобных элементов можно привести к виду
![]() ,
,
а их реализация в виде структурной схемы показана на рис. 6.

Рис. 6. Реализация зависимости ![]()
Другой способ реализации неявно заданных характеристик – использование вспомогательной переменной ![]() , в зависимости от которой определяются значения напряжения и тока:
, в зависимости от которой определяются значения напряжения и тока:
![]() .
.
Значение самой переменной ![]() находится из алгебраического уравнения. Например, для модели идеального диода имеем
находится из алгебраического уравнения. Например, для модели идеального диода имеем
Для этого способа уравнения запишутся в виде
![]() ,
,
а их структурная реализация показана на рис. 7. Программа блока "Язык программирования" для модели идеального диода может иметь вид
inputx;
if x<0 then begin u=x; i=0 end else begin u=0; i=x end;
outputu,i;
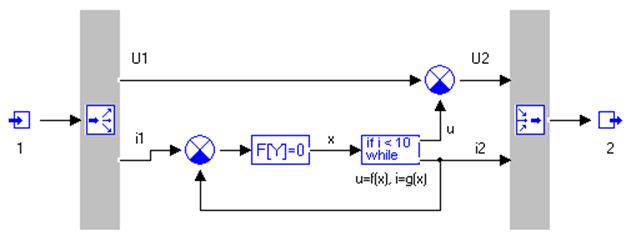
Рис. 7. Реализация зависимости ![]() ,
, ![]()
4. Модели соединений
С помощью одних только линий связи можно выполнить последовательное соединение двухполюсных элементов, но невозможно реализовать даже простейшую одноконтурную цепь, поскольку нет средств подсоединения к проводнику с заданным потенциалом. Такое соединение является необходимым, поскольку иначе невозможно однозначно определить напряжения в узлах. Для фиксации потенциала в заданной точке цепи используется заземление. Если цепь содержит несколько контуров, то необходимы элементы, позволяющие соединить в одном узле более двух проводников. Обычные ответвления от линии связи не подходят для этого, поскольку в них не выполняется закон Кирхгофа для токов. Поэтому в библиотеку элементов включены узлы. Все соединения могут быть двух видов: ответвления, в которых число выходов на 1 больше числа входов, и замыкания, в которых число входов на 1 больше числа выходов. В библиотеке элементов реализованы 4 различных соединений: два узла (ответвление и замыкание) и два заземления (земля-ответвление и земля-замыкание). Уравнения этих элементов формируются на основе законов Кирхгофа.
Элемент "Узел-ответвление" имеет один векторный вход и два векторных выхода. Обозначим через ![]() и
и ![]() напряжение и ток на входе, а через
напряжение и ток на входе, а через ![]() ,
, ![]() и
и ![]() ,
, ![]() напряжения и токи на выходах. Тогда уравнения узла запишутся в виде
напряжения и токи на выходах. Тогда уравнения узла запишутся в виде
![]() .
.
Нам не хватает одного уравнения, чтобы найти ток ![]() . В правильно составленной схеме каждому ответвлению соответствует ровно одно замыкание (узел-замыкание или земля-замыкание), в котором и формируется нужное уравнение. В результате решения всех таких уравнений, число которых равно числу независимых контуров, находятся все неизвестные токи, в том числе и ток
. В правильно составленной схеме каждому ответвлению соответствует ровно одно замыкание (узел-замыкание или земля-замыкание), в котором и формируется нужное уравнение. В результате решения всех таких уравнений, число которых равно числу независимых контуров, находятся все неизвестные токи, в том числе и ток ![]() нашего узла. Значение этого тока передается из какого-либо замыкания по "невидимой" линии связи с помощью блоков "В память" и "Из памяти". Блок "В память" формирует глобальные переменные, которым по умолчанию даются имена Y1, Y2, Y3, … Эти имена можно изменить, но нам удобнее этого не делать. Отметим, что физический смысл этих переменных – контурные токи.
нашего узла. Значение этого тока передается из какого-либо замыкания по "невидимой" линии связи с помощью блоков "В память" и "Из памяти". Блок "В память" формирует глобальные переменные, которым по умолчанию даются имена Y1, Y2, Y3, … Эти имена можно изменить, но нам удобнее этого не делать. Отметим, что физический смысл этих переменных – контурные токи.
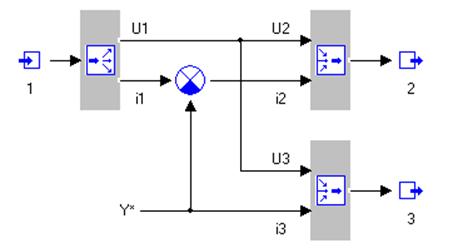
Рис. 8. Модель элемента "Узел-ответвление"
Модель узла-ответвления показана на рис. 8. Она содержит блок "Из памяти", который выбирает одну из глобальных переменных, сформированных блоком "В память". На приведенном рисунке имя этой переменной Y*, но в действительности вместо знака * будет стоять конкретное число.
Элемент "Узел-замыкание" имеет два векторных входа и один векторный выход. Обозначим через ![]() ,
, ![]() и
и ![]() ,
, ![]() напряжения и токи на входах, а через
напряжения и токи на входах, а через ![]() и
и ![]() напряжение и ток на выходе. Тогда уравнения узла запишутся в виде
напряжение и ток на выходе. Тогда уравнения узла запишутся в виде
![]() .
.
Значение напряжения ![]() не является необходимым для нахождения
не является необходимым для нахождения ![]() и
и ![]() , но оно используется для формирования уравнения, которое добавляется в систему уравнений, из которых находятся контурные токи.
, но оно используется для формирования уравнения, которое добавляется в систему уравнений, из которых находятся контурные токи.
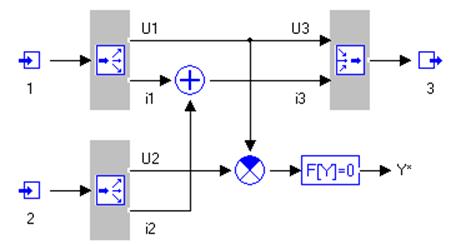
Рис. 9. Модель элемента "Узел-замыкание"
Модель узла-замыкания показана на рис. 9. Она содержит блок "F(Y) = 0", с помощью которого формируется система алгебраических уравнений. Выходом блока является одна из компонент решения этой системы, в данном случае – один из неизвестных контурных токов, который с помощью блока "В память" задается как глобальная переменная с именем Y* и передается в один из элементов "Узел-ответвление" или "Земля-ответвление". При этом не имеет значения, в какой конкретно элемент-ответвление передается эта переменная, важно лишь, чтобы это был единственный элемент, принимающий эту переменную.
Элемент "Земля-ответвление" реализует подсоединение к проводу с нулевым потенциалом (земле). Он не имеет входов, имеет единственный векторный выход и описывается соотношением ![]() . Значение тока на выходе определяется в результате решения алгебраических уравнений и передается из какого-либо элемента "Узел-замыкание" или "Земля-замыкание" с помощью блока "В память". Модель показана на рис. 10а и содержит блок "Из памяти", выбирающий одну из глобальных переменных.
. Значение тока на выходе определяется в результате решения алгебраических уравнений и передается из какого-либо элемента "Узел-замыкание" или "Земля-замыкание" с помощью блока "В память". Модель показана на рис. 10а и содержит блок "Из памяти", выбирающий одну из глобальных переменных.

Рис. 10. Модели заземления: а – земля-ответвление, б – земля-замыкание
Элемент "Земля-замыкание" имеет единственный векторный вход, не имеет выходов и описывается уравнением ![]() . Это уравнение с помощью блока "F(Y) = 0" добавляется в систему алгебраических уравнений, из решения которой находятся неизвестные токи. Один из найденных токов передается с помощью блока "В память" в какой-либо элемент "Узел-ответвление" или "Земля-ответвление". Модель элемента "Земля-замыкание" показана на рис. 10б.
. Это уравнение с помощью блока "F(Y) = 0" добавляется в систему алгебраических уравнений, из решения которой находятся неизвестные токи. Один из найденных токов передается с помощью блока "В память" в какой-либо элемент "Узел-ответвление" или "Земля-ответвление". Модель элемента "Земля-замыкание" показана на рис. 10б.
Нетрудно видеть, что приведенные модели соединений обеспечивают выполнение 1-го закона Кирхгофа (для токов). Уравнения вида ![]() в узлах-замыканиях и вида
в узлах-замыканиях и вида ![]() в заземлениях-замыканиях обеспечивают также и выполнение 2-го закона Кирхгофа (для напряжений). Таким образом, совокупность уравнений двухполюсных элементов и соединений полностью описывает электрическую цепь.
в заземлениях-замыканиях обеспечивают также и выполнение 2-го закона Кирхгофа (для напряжений). Таким образом, совокупность уравнений двухполюсных элементов и соединений полностью описывает электрическую цепь.
Для численного решения полученной системы дифференциально-алгебраических уравнений в ПК "МВТУ" реализованы 10 явных и 6 неявных методов, среди которых – новые явные адаптивные методы, эффективные для жестких систем, а также новые неявные методы. Краткие описания этих методов, а также рекомендации по их использованию приведены в [6, 7].
5. Пример
На рис. 11а представлена структурная схема однополупериодного выпрямителя, сформированная в ПК "МВТУ". Все элементы этой схемы являются замаскированными макроблоками, соединенными между собой векторными линиями связи. В состав схемы входит модель линейного трансформатора, реализованная в виде макроблока, внутренняя структура которого показана на рис. 11б. В модели имеется три ответвления (заземление и узел в основной модели + узел в модели трансформатора) и три замыкания (два заземления в основной модели + узел в модели трансформатора). Таким образом, схема содержит три независимых контура.

Рис. 11. Модели выпрямителя (а) и трансформатора (б)
Рассмотренная методика построения моделей электрических схем может быть реализована в любом программном комплексе структурного моделирования, содержащем средства для задания алгебраических уравнений (типа блока "F(Y)=0"), а также средства для передачи сигналов по "невидимой" линии связи (типа блоков "В память" и "Из памяти"). По сравнению с аналогичными моделями пакета Simulink, построенные согласно этой методике модели отличаются открытостью и наглядностью.
Литература
1. Черных И.В. Моделирование электротехнических устройств в MATLAB, SimPowerSystemsи Simulink. –М: ДМК Пресс, СПБ: Питер, 2008. –288 с.
2. ПК "МВТУ". Учебная и демонстрационная версии, документация, методические материалы. http://mvtu.power.bmstu.ru/
3. Козлов О.С., Кондаков Д.Е., Скворцов Л.М. и др. Программный комплекс "Моделирование в технических устройствах". http://model.exponenta.ru/mvtu/20050615.html.
4. Козлов О.С., Кондаков Д.Е., Скворцов Л.М. и др. Программный комплекс для исследования динамики и проектирования технических систем // Информационные технологии. – 2005. – № 9. – С. 20–25.
5. Козлов О.С., Скворцов Л.М. Исследование и проектирование автоматических систем с помощью программного комплекса "МВТУ" // Информационные технологии. – 2006. – № 8. – С. 9–15.
6. Козлов О.С., Скворцов Л.М., Ходаковский В.В. Решение дифференциальных и дифференциально-алгебраических уравнений в программном комплексе "МВТУ". http://model.exponenta.ru/mvtu/20051121.html.
7. Козлов О.С., Скворцов Л.М., Ходаковский В.В. Решение дифференциальных уравнений в программном комплексе "МВТУ" // Информационные технологии. – 2006. – № 5. – С. 10–16.
Публикации с ключевыми словами: математическое моделирование, электрические цепи, структурные схемы, комплексы программ
Публикации со словами: математическое моделирование, электрические цепи, структурные схемы, комплексы программ
Смотри также:
- Математическая модель перспективного испытательно-измерительного тренажерного стенда для освоения и оценки работоспособности специального оборудования быстроходных машин
- 77-48211/638257 О преподавании учебной дисциплины “Математическое моделирование”
- 77-30569/242041 Синтез концептуальной динамически параметризованной модели системы разнородных комплексов специального вооружения
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (499) 263-69-71 |
|
||||
| © 2003-2024 «Инженерный вестник» Тел.: +7 (499) 263-69-71 | |||||