научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 06, июнь 2012
DOI: 10.7463/0612.0403852
УДК 629.33
Россия, МГТУ им. Н.Э. Баумана
ВВЕДЕНИЕ
В различных условиях и режимах движения (разгон-торможение, криволинейное движение или преодоление подъема, движение по твердой или деформируемой опорной поверхности и т. д.) перераспределение мощности источника энергии, подводимой к колесам разных бортов и осей, должно быть различным [1, 2].
Трансмиссия с целью улучшения показателей важнейших эксплуатационных свойств автомобиля (безопасности и подвижности) должна обеспечивать непрерывное регулирование мощности, подводимой к колесному движителю, в зависимости от условий его качения, т. е. должно осуществляться приспособление машины, в частности полноприводного многоосного автомобиля, к случайно изменяющимся условиям внешней среды. Трансмиссия должна реализовать быструю и точную реакцию автомобиля на изменение силовых и кинематических параметров движения [3].
На кафедре «Колесные машины» МГТУ им. Н.Э. Баумана разработан алгоритм распределения моментов по колесам пропорционально относительной нормальной нагрузке, приходящейся на каждый из движителей. Эффективность предложенных теоретических положений была подтверждена результатами имитационного математического моделирования. Управление тяговыми электродвигателями было при этом организовано по «моменту» при одновременном ограничении уровня используемой мощности [4, 5, 6].
При разработке систем управления электродвигателями возможна реализация различных подходов: «угловой скорости», «по моменту», «по моменту» с ограничением по уровню используемоймощности. В данном случае в работе решается задача сравнительной оценки эффективности управления электромеханической трансмиссией колесной машины при организации управления тяговыми электродвигателями «по моменту» и перераспределении моментов пропорционально относительным нормальным нагрузкам, приходящимся на каждое колесо, и при управлении также по «по моменту», но с ограничением по уровню используемой общей мощности.
СРАВНИТЕЛЬНЫЙ АНАЛИЗ РЕЗУЛЬТАТОВ МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ КОЛЕСНОЙ МАШИНЫ (КМ) ПРИ РАЗЛИЧНЫХ ПОДХОДАХ К РАСПРЕДЕЛЕНИЮ МОМЕНТОВ ПО КОЛЕСАМ
Исследуется эффективность двух вариантов (законов) распределения моментов по колесам.
ЗАКОН 1
| (1) |
где ![]() - угловая скорость i-го колеса (или выходного вала электродвигателя i-го колеса);
- угловая скорость i-го колеса (или выходного вала электродвигателя i-го колеса); ![]() - выходной момент электродвигателя i-го колеса,
- выходной момент электродвигателя i-го колеса, ![]() - максимальная мощность электродвигателя каждого колеса;
- максимальная мощность электродвигателя каждого колеса;  отношение нормальной силы на i-ом колесе
отношение нормальной силы на i-ом колесе ![]() к суммарной силе по всем n колесам;
к суммарной силе по всем n колесам; ![]() - степень использования общей мощности (нажатие водителем на педаль «газ» [0;1]).
- степень использования общей мощности (нажатие водителем на педаль «газ» [0;1]).
Входными (измеряемыми в процессе движения) величинами для организации работы закона являются: h, ![]() ,
,  [6, 7, 8].
[6, 7, 8].
При малых оборотах (до некоторого установившегося значения  ) множитель
) множитель  в выражении (1) принимается равным
в выражении (1) принимается равным ![]() .
.
ЗАКОН 2
| (2) |
где ![]() - выходной момент электродвигателя i-го колеса,
- выходной момент электродвигателя i-го колеса, ![]() - максимальный момент каждого электродвигателя; отношение нормальной силы на i-ом колесе
- максимальный момент каждого электродвигателя; отношение нормальной силы на i-ом колесе ![]() к суммарной силе по всем n колесам;
к суммарной силе по всем n колесам; ![]() - степень использования общей мощности (нажатие водителем на педаль «газ» [0;1]).
- степень использования общей мощности (нажатие водителем на педаль «газ» [0;1]).
Входными (измеряемыми в процессе движения) величинами для организации работы закона являются: h, .
При проведении моделирования динамика выходного вала электродвигателя, связанного непосредственно с движителем, расчетная схема которого представлена на рис. 1, описывается уравнением
| (3) |
где ![]() – угловое ускорение i-го колеса;
– угловое ускорение i-го колеса; ![]() – момент инерции i-го колеса (принимается равным для всех колес);
– момент инерции i-го колеса (принимается равным для всех колес); ![]() – момент сопротивления на i-ом колесе, определяемый по зависимсоти
– момент сопротивления на i-ом колесе, определяемый по зависимсоти
| (4) |
где ![]() – момент на i-ом колесе от действия тормозной системы автомобиля;
– момент на i-ом колесе от действия тормозной системы автомобиля; ![]() – момент сопротивления качению i-го колеса;
– момент сопротивления качению i-го колеса; ![]() – продольная реакция i-го движителя с грунтом;
– продольная реакция i-го движителя с грунтом; ![]() – расстояние от оси колеса до опорной поверхности;
– расстояние от оси колеса до опорной поверхности; ![]() - продольная сила, приложенная к оси i-го колеса.
- продольная сила, приложенная к оси i-го колеса.
Рис. 1. Расчетная схема качения колеса
Внешняя характеристика электродвигателя соответствует графику, представленному на рисунке 2.
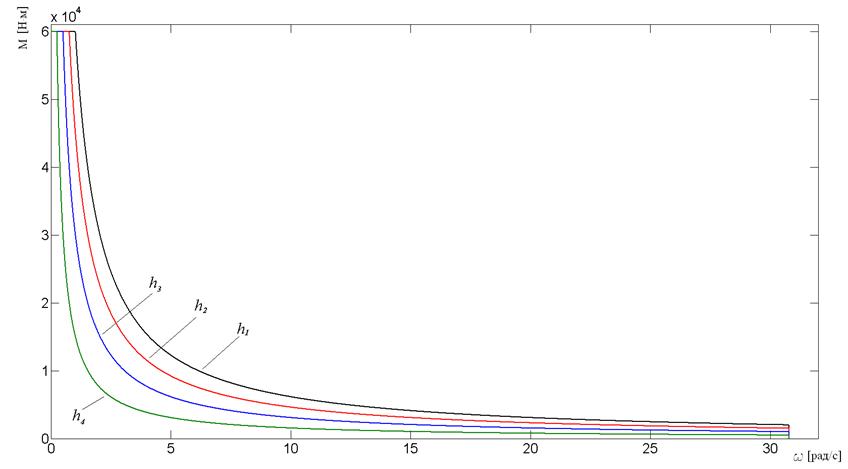
Рис. 2. Характеристики тягового электродвигателя, приведенные к скорости вращения движителя:![]() = 1;
= 1;![]() =0.75×
=0.75×![]() ;
;![]() =0.5×
=0.5×![]() ;
; ![]() =0.25×
=0.25×![]()
МЕТОДИКА ПРОВЕДЕНИЯ ИССЛЕДОВАНИЙ
Ниже представлены результаты численного моделирования движения КМ [7, 8] при распределении моментов по движителям по двум исследуемым законам. Моделируются пять режимов движения.
1) Прямолинейный разгон. КМ разгоняется с начальной скорости V=1 км/ч на опорном основании «грунтовое основание» (с коэффициентом взаимодействия движителя с опорным основанием при полном буксовании μsmax = 0,6), угол поворота всех колес в процессе моделирования равняется нулю, степень использования мощности двигателей h нарастает от 0 до 0,5 (50 %) за 4 с. Время моделирования t = 10 c.
2) Условия, точно такие же, как в пункте (1), только степень использования мощности h нарастает от 0 до 1 (100 %) за 4 с. Время моделирования t = 10 c.
3) Вход и движение в повороте с фиксированным радиусом с поддержанием постоянной скорости V=30 км/ч на опорном основании «грунтовое основание» (коэффициентом взаимодействия движителя с опорным основанием при полном буксовании μsmax = 0,6), все колеса автомобиля являются управляемыми. Время моделирования t = 10 c.
4) Вход и движение в повороте аналогично пункту (3), но без воздействия на педаль газ, ![]() .
.
5) Прямолинейное движение на подъем с углом ![]() При этом КМ начинает двигаться со скоростью V=10 км/ч на опорном основании «грунтовое основание», угол поворота всех колес в процессе моделирования равняется нулю, степень использования мощности двигателей h нарастает от 0 до 0,8 (80 %) за 4 с. Время моделирования t = 10 c.
При этом КМ начинает двигаться со скоростью V=10 км/ч на опорном основании «грунтовое основание», угол поворота всех колес в процессе моделирования равняется нулю, степень использования мощности двигателей h нарастает от 0 до 0,8 (80 %) за 4 с. Время моделирования t = 10 c.
Исследуемые случаи движения КМ, безусловно, весь спектр возможных условий не охватывают (что сделать и невозможно, потому что он очень широк), но в тоже время являются наиболее типовыми.
АНАЛИЗ РЕЗУЛЬТАТОВ МОДЕЛИРОВАНИЯ
Степень использования общей мощности от времени определяет водитель путем нажатия на педаль «газ» (рис. 3).
РЕЖИМ ДВИЖЕНИЯ 1
Закон 1
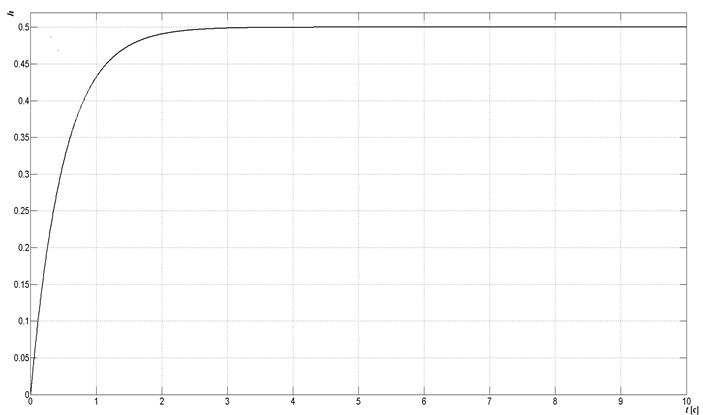
Рис. 3. Зависимость изменения степени использования общей мощности (режим движения 1)
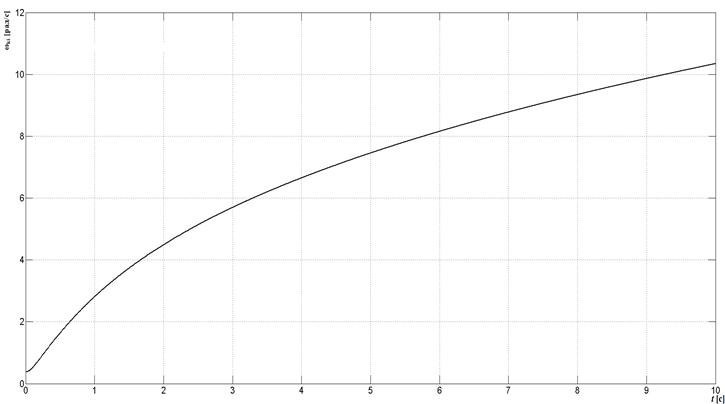
Рис.4. Зависимости изменения угловых скоростей вращения колес от времени (режим движения 1)
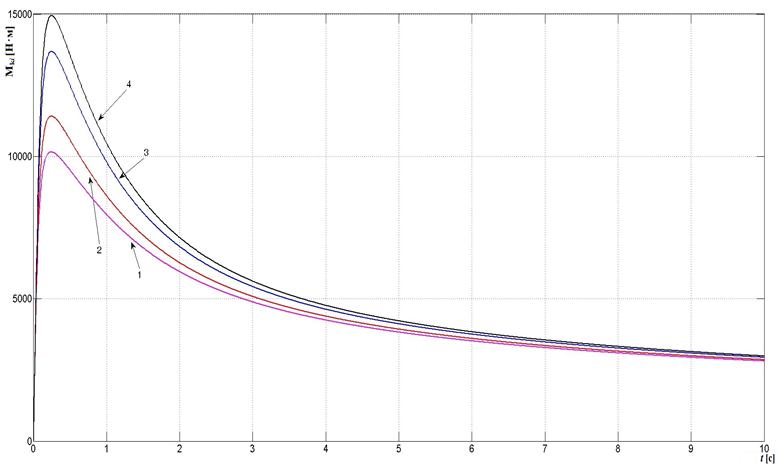
Рис. 5. Зависимости изменения крутящих моментов на колесах от времени (режим движения 1)
Цифрами на рисунках обозначена принадлежность графика к соответствующей оси (1, 2, 3, 4).
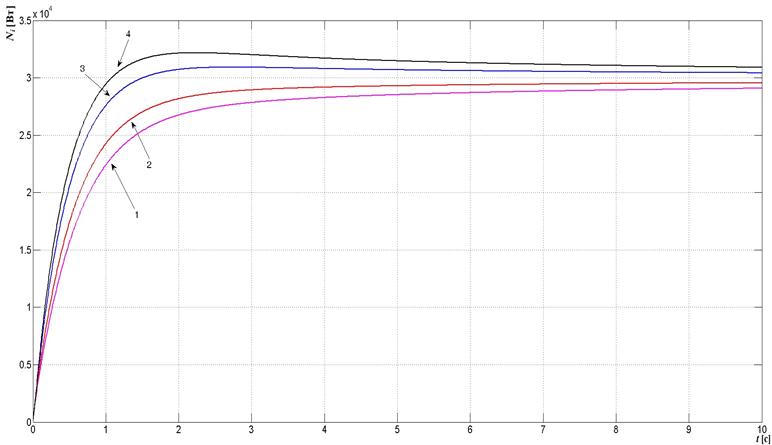
Рис. 6. Зависимость изменения мощностей электродвигателей от времени (режим движения 1)
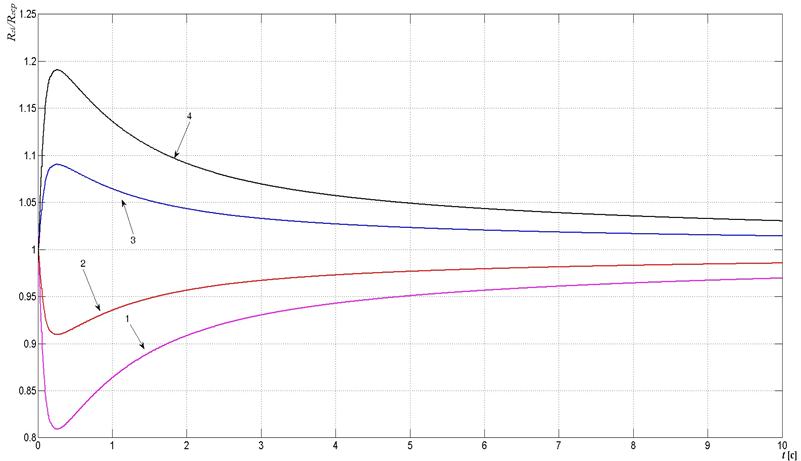
Рис. 7. Зависимость изменения коэффициентов коррекции от времени (режим движения 1)
КМ разгонялась, угловые скорости всех колес одинаковые (рис. 4), моменты на колесах (рис. 5) реализованы в соответствии с коэффициентами коррекции (рис. 7), соответственно, мощность каждого электродвигателя разная (рис. 6). Суммарная мощность (по рис. 6) равна степени использования общей мощности, которую определяет водитель нажатием на педаль «газ». Для данного случая h = 5 0%, соответственно ![]() должно быть 2,4×105 Вт. Если просуммировать все значения мощностей по рис. 6, то в сумме и получается 2,4×105 Вт.
должно быть 2,4×105 Вт. Если просуммировать все значения мощностей по рис. 6, то в сумме и получается 2,4×105 Вт.
Закон 2
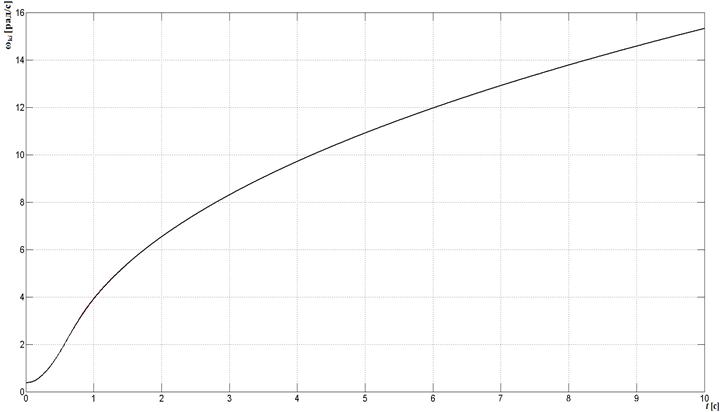
Рис. 8. Зависимости изменения угловых скоростей вращения колес от времени (режим движения 1)
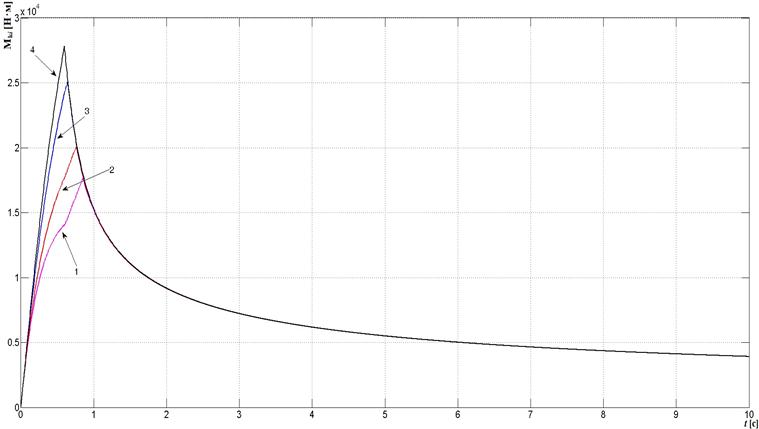
Рис. 9. Зависимости изменения крутящих моментов на колесах от времени (режим движения 1)
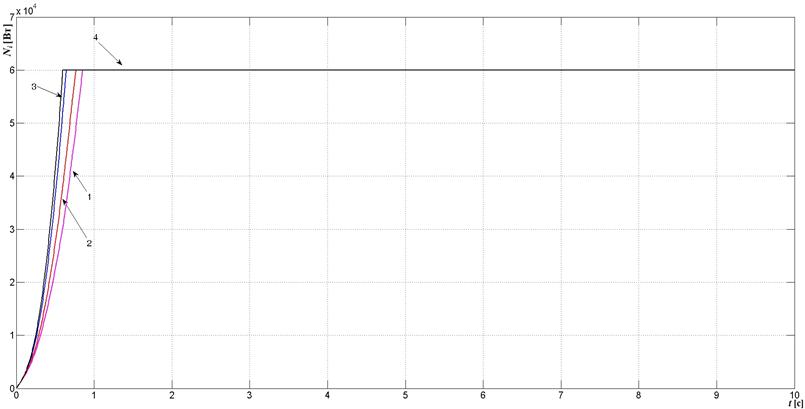
Рис. 10. Зависимость изменения мощностей электродвигателей от времени (режим движения 1)
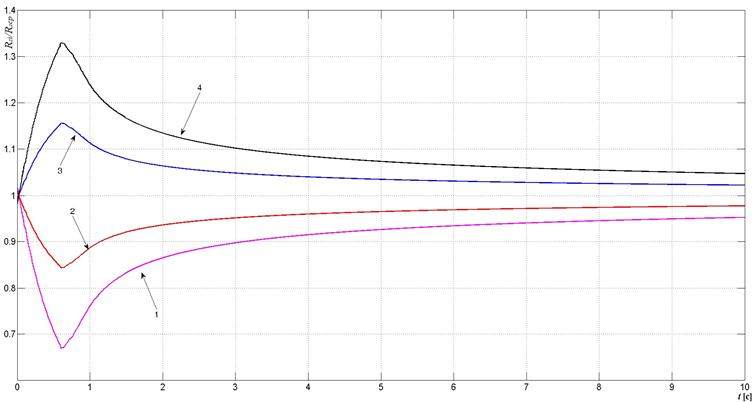
Рис. 11. Зависимость изменения коэффициентов коррекции от времени (режим движения 1)
КМ разгонялась более интенсивно, чем при законе №1 (рис. 8), т.к. через одну секунду движения все электродвигатели вышли на режим максимальной мощности (рис. 10). Перераспределение моментов (рис. 9) реализовывалось только в совсем маленькой области по времени, дальнейшее перераспределение, как этого «требуют» коэффициенты коррекции (рис. 11) оказалось невозможным в связи с тем, что двигатели выходят на линию максимальной мощности (рис. 10). Напомним, что нажатие на педаль «газ» в данном случае было 50 %-ым, т.е. дальнейшее воздействие на педаль к увеличению динамики разгона КМ привести не сможет (см. рис. 10). Поскольку перераспределения моментов достичь не удается, то КМ двигается с повышенными энергозатратами (колеса разгруженных осей больше буксуют).
РЕЖИМ ДВИЖЕНИЯ 2
Закон 1
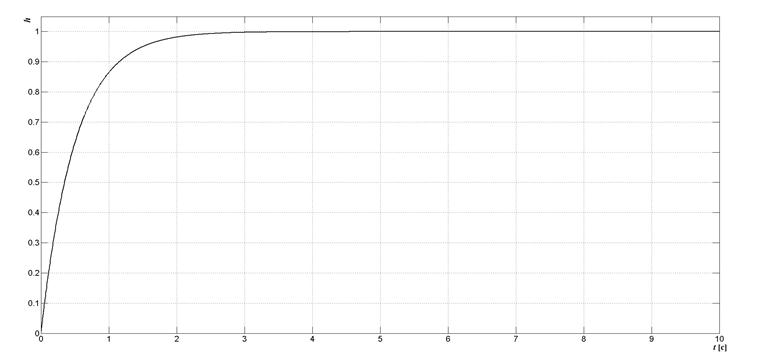
Рис. 12. Зависимость изменения степени использования общей мощности (режим движения 2)
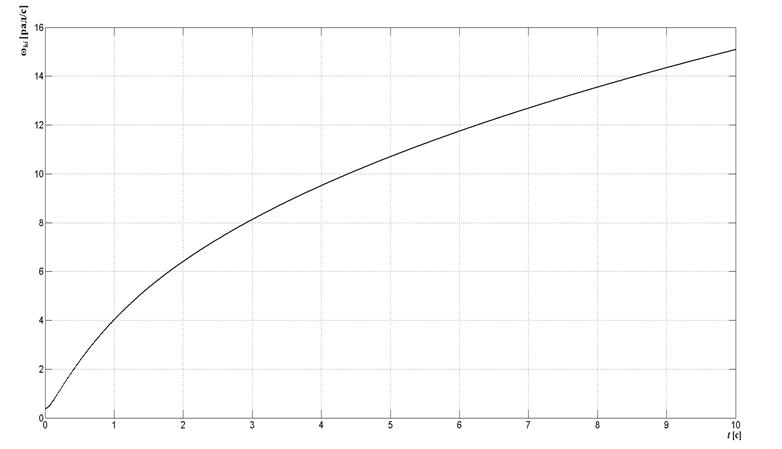
Рис. 13. Зависимости изменения угловых скоростей вращения колес от времени (режим движения 2)
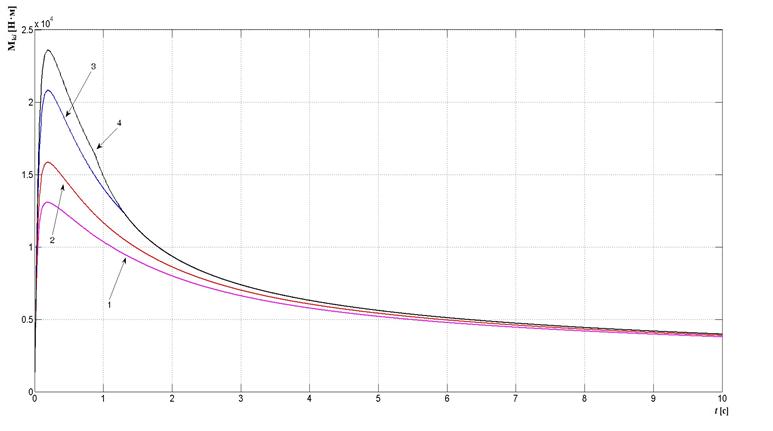
Рис. 14. Зависимости изменения крутящих моментов на колесах от времени (режим движения 2)
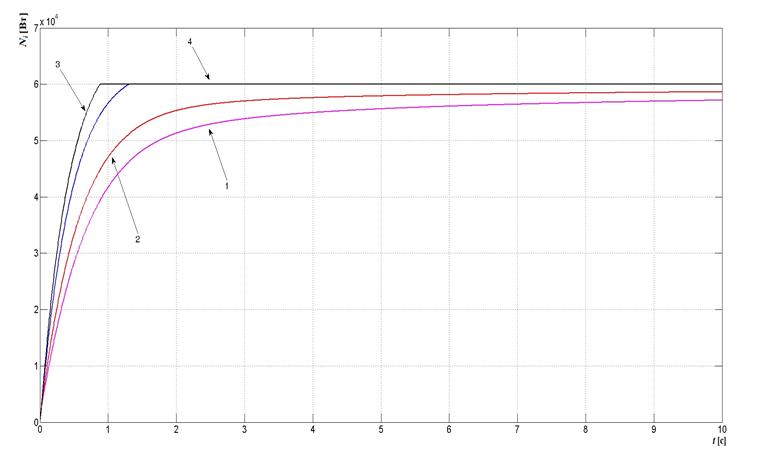
Рис. 15. Зависимость изменения мощности электродвигателей от времени (режим движения 2)
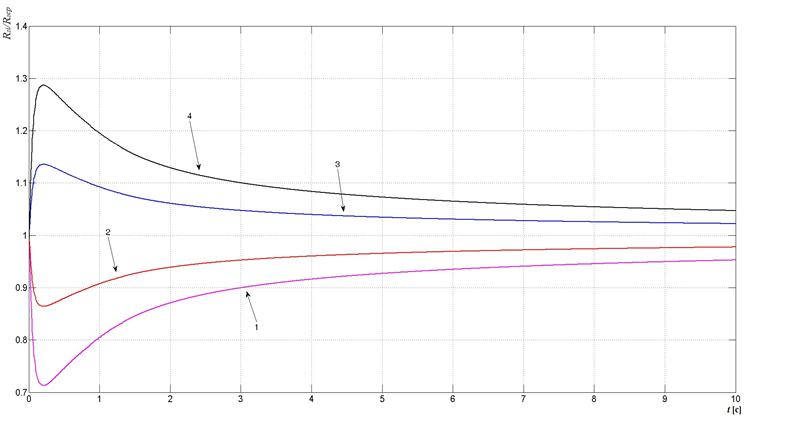
Рис. 16. Зависимость изменения коэффициентов коррекции от времени (режим движения 2)
РЕЖИМ ДВИЖЕНИЯ 2
Закон 2
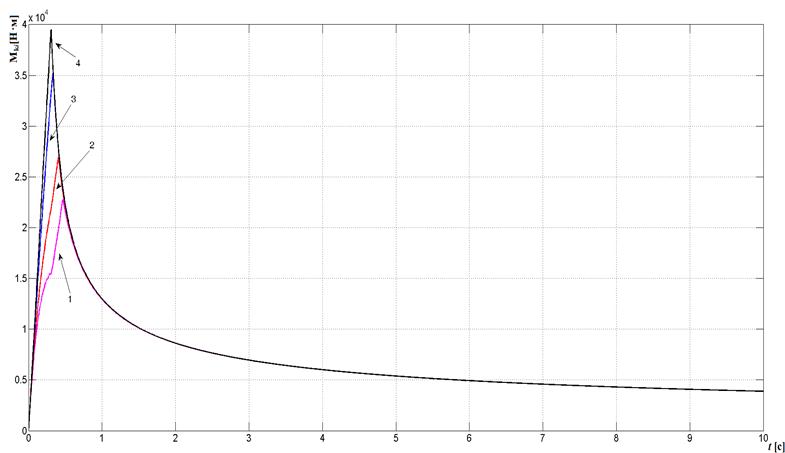
Рис. 17. Зависимости изменения крутящих моментов на колесах от времени (режим движения 2)
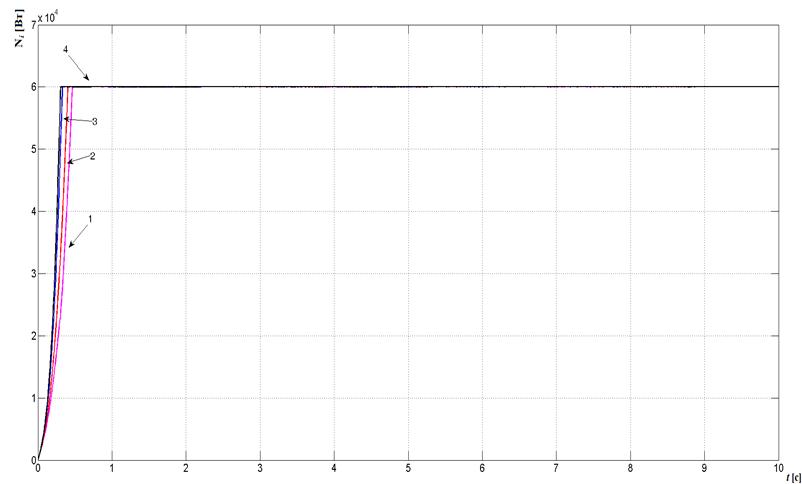
Рис. 18. Зависимость изменения мощности электродвигателей от времени (режим движения 2)
При полном нажатии на педаль «газ» интенсивность разгона при законах № 1 и № 2 одинаковая, что показывает сравнение рис. 8 и рис. 13, в то же время энергоэффективность при законе № 1 предпочтительнее (рис. 15 и рис. 18). Анализ рис. 14 и 15 показывает, что к разгруженным осям с целью не допущения буксования подводится меньший момент и мощность реализуется даже меньшая, чем максимально возможная. В случае, если затрачивать всю мощность, то колеса будут находится в режиме повышенного буксования, но большей удельной тяги достичь при этом не удастся.
РЕЖИМ ДВИЖЕНИЯ 3
Закон 1

Рис. 19. Зависимость изменения степени использования общей мощности (режим движения 3)
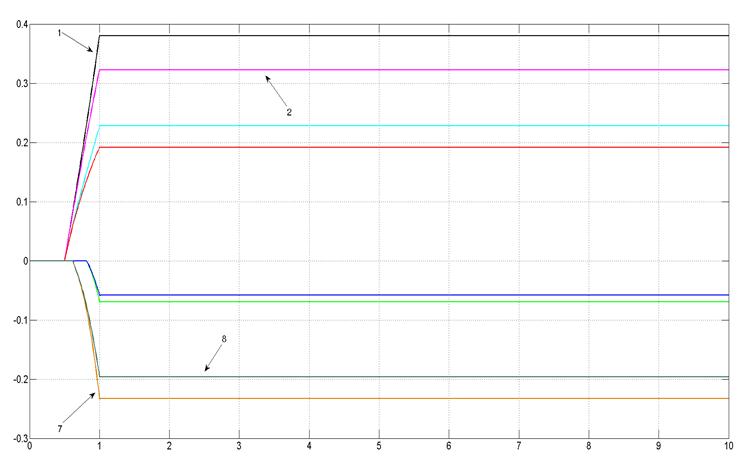
Рис. 20. Зависимости изменения углов поворота колес (режим движения 3)
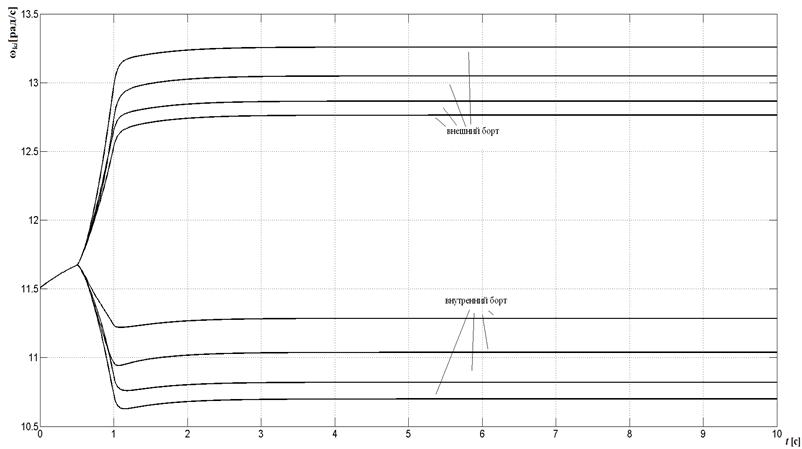
Рис. 21. Зависимости изменения угловых скоростей вращения колес от времени (режим движения 3)
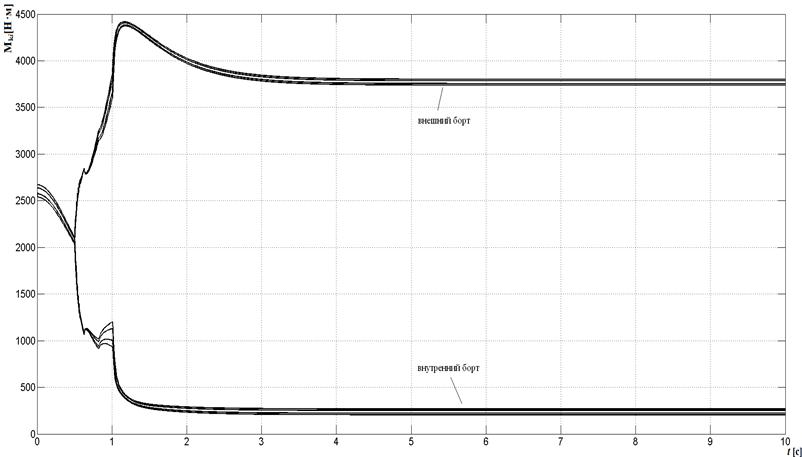
Рис. 22. Зависимости изменения крутящих моментов на колесах от времени (режим движения 3)
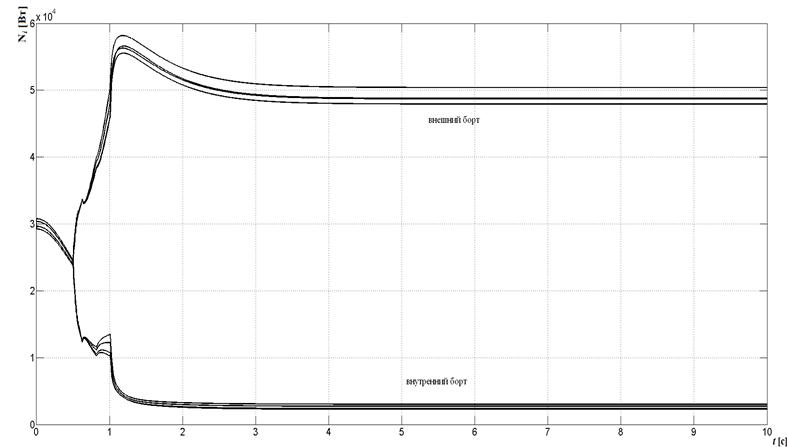
Рис. 23. Зависимости изменения мощности электродвигателей от времени (режим движения 3)
КМ двигается в повороте с поддержанием постоянной скорости (рис. 21), угловые скорости перераспределены в соответствии с кривизной движения каждого колеса. Перераспределение моментов (рис. 23) происходит в соответствии с коэффициентами коррекции (на более нагруженном внешнем борте реализуются большие моменты). Суммарная мощность соответствует степени использования общей мощности, определяемой водителем воздействием на педаль «газ» (рис. 19).
РЕЖИМ ДВИЖЕНИЯ 3
Закон 2
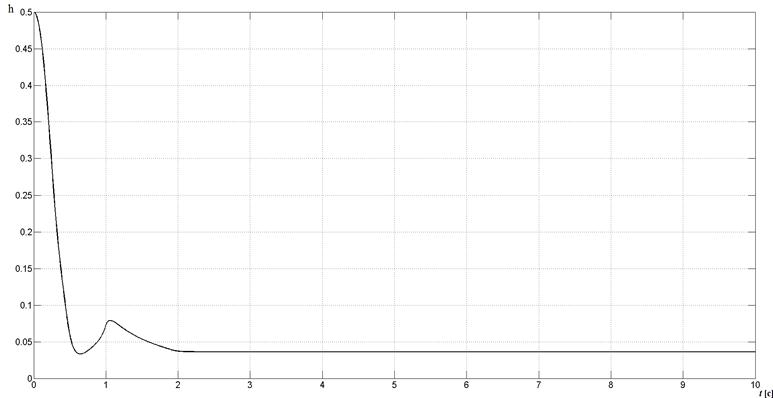
Рис. 24. Зависимость изменения степени использования общей мощности (режим движения 3)
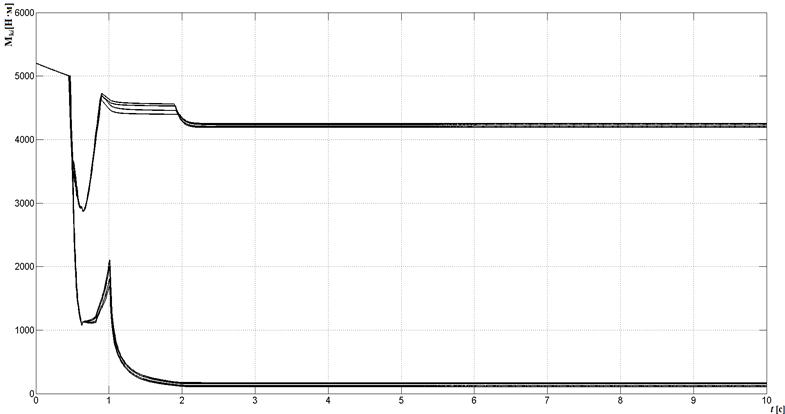
Рис. 25. Зависимости изменения крутящих моментов на колесах от времени (режим движения 3)
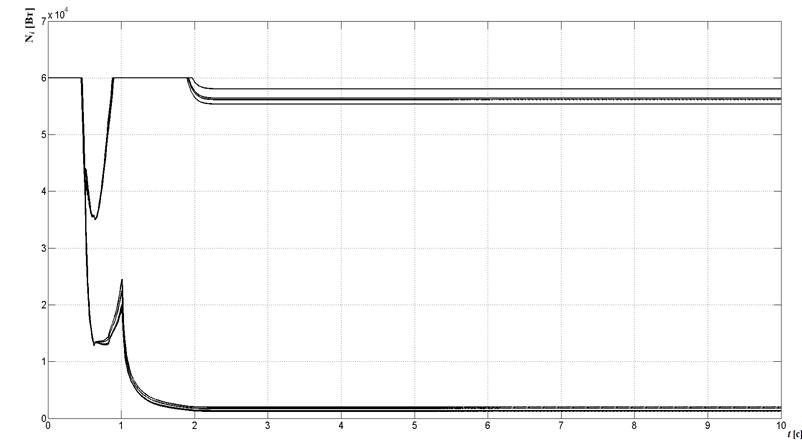
Рис. 26. Зависимости изменения мощности электродвигателей от времени (режим движения 3)
КМ двигается в повороте с поддержанием постоянной скорости. Перераспределение моментов (рис. 25) возможно только в том случае, когда электродвигатели «уходят» с режима максимальной мощности (рис. 26), что для данного случая движения возможно только при очень маленьких нажатиях на педаль «газ» (рис. 24).
РЕЖИМ ДВИЖЕНИЯ 4
Закон 1
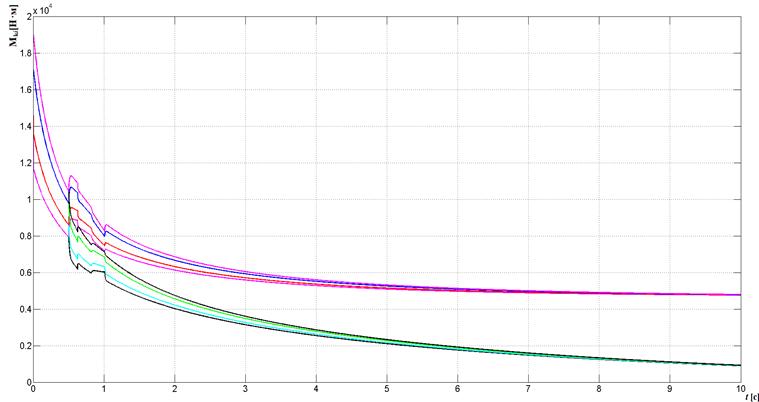
Рис. 27. Зависимости изменения крутящих моментов на колесах от времени (режим движения 4)
Рис. 28. Зависимости изменения мощности электродвигателей от времени (режим движения 4)
Рис. 29. Зависимость изменения коэффициентов коррекции от времени (для данного случая без учета числа колес) (режим движения 4)
КМ разгоняется в повороте. Моменты на колесах (рис. 27) изменяются в соответствии с коэффициентами коррекции (рис. 29). Общая суммарная мощность (рис. 28) определяется нажатием на педаль «газ». Водитель имеет возможность изменить динамику КМ, воздействуя на педаль управления.
РЕЖИМ ДВИЖЕНИЯ 4
Закон 2
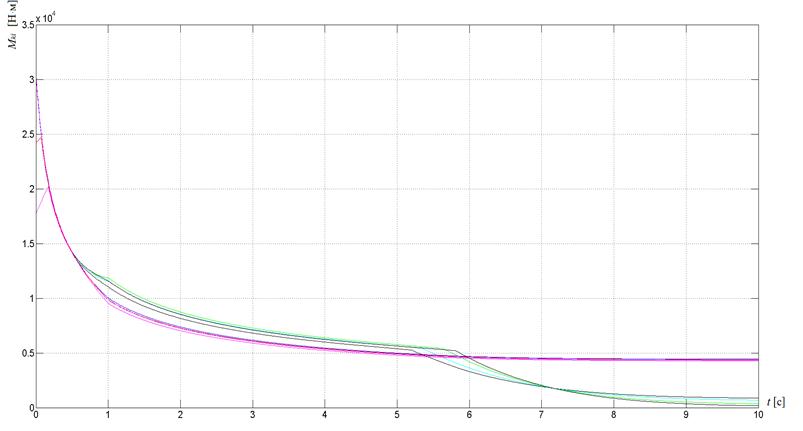
Рис. 30. Зависимости изменения крутящих моментов на колесах от времени (режим движения 4)
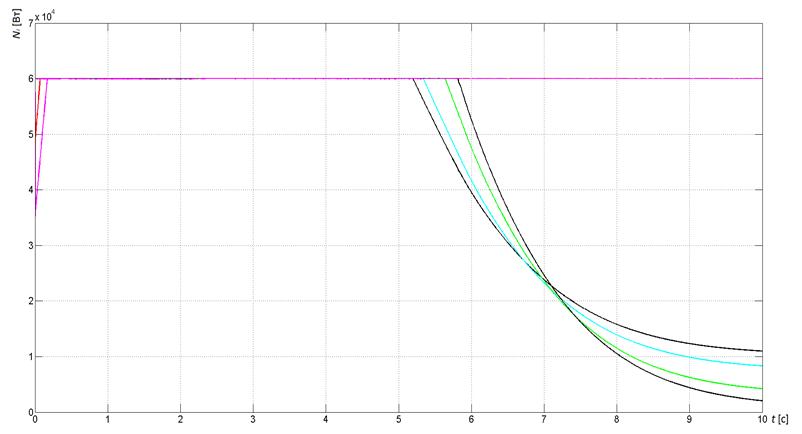
Рис. 31. Зависимости изменения мощности электродвигателей от времени (режим движения 4)
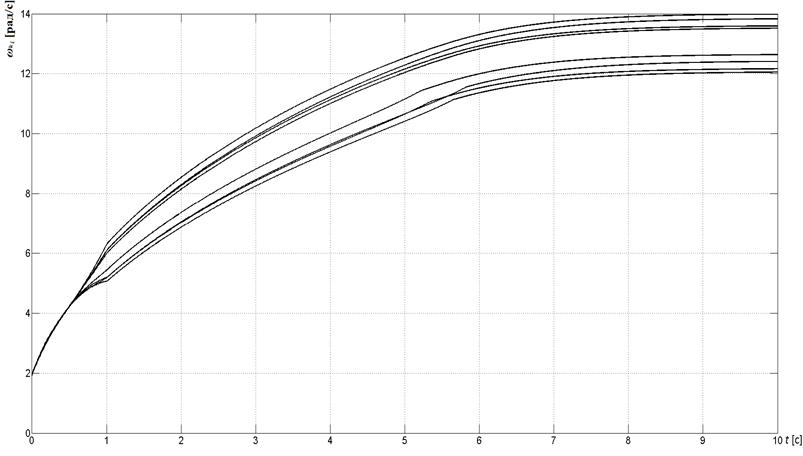
Рис. 32. Зависимости изменения угловых скоростей вращения колес от времени (режим движения 4)
Рис. 33. Зависимость изменения коэффициентов коррекции от времени (режим движения 4)
КМ разгоняется в повороте. В соответствии с рис. 33 большие моменты должны быть реализованы на внешнем борте, на практике все наоборот в большинстве режимов движения (рис. 30). Объясняется это тем, что все двигатели достаточно быстро «выходят» на режим максимальной мощности (рис. 31).
Нужного перераспределения (на внешний борт больше момента, на внутренний меньше) удается добиться тогда, когда двигатели «уходят» с характеристики максимальной мощности.
Энергоэффективность в сравнении с законом № 1 значительно снижается.
РЕЖИМ ДВИЖЕНИЯ 5
Закон 1
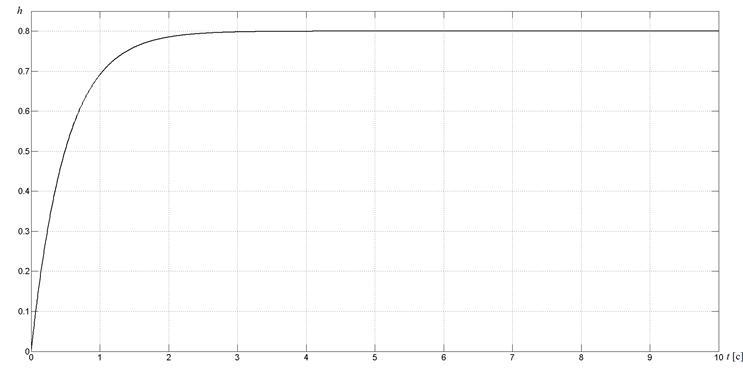
Рис. 34. Зависимость изменения степени использования общей мощности (режим движения 5)
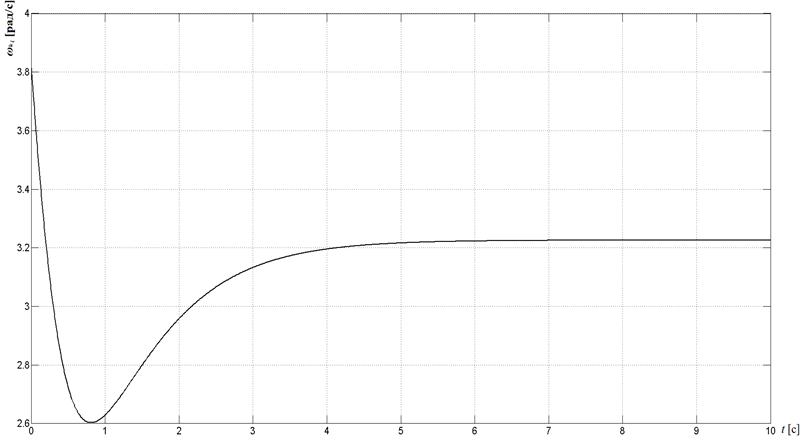
Рис. 35. Зависимости изменения угловых скоростей вращения колес от времени (режим движения 5)
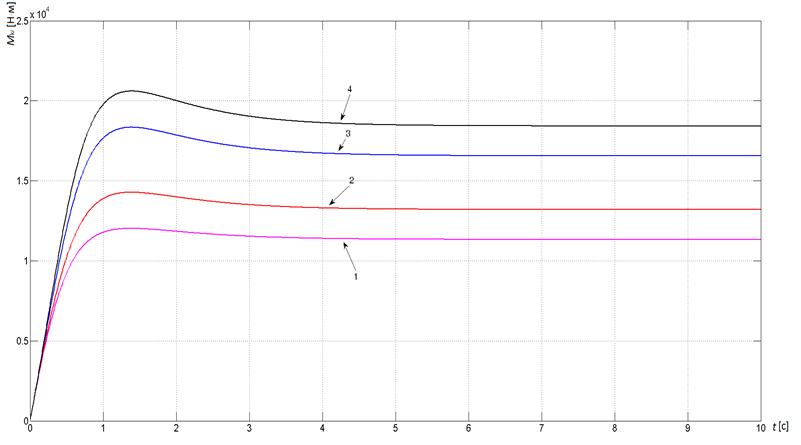
Рис. 36. Зависимости изменения крутящих моментов на колесах от времени (режим движения 5)
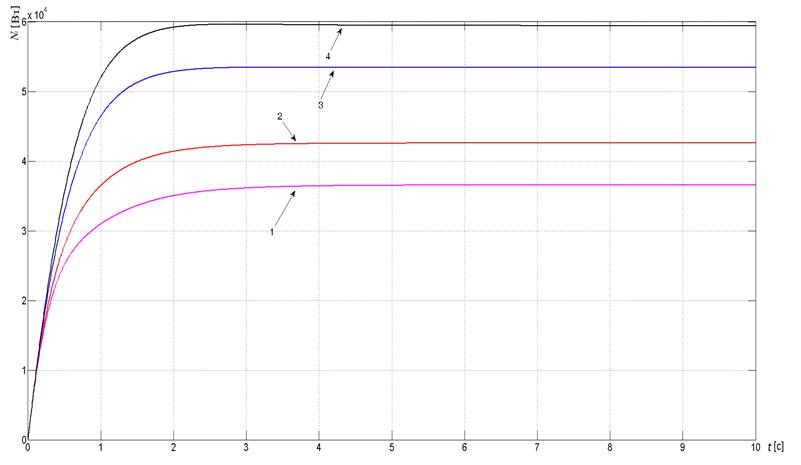
Рис. 37. Зависимости изменения мощности электродвигателей от времени (режим движения № 5)
Рис. 38. Зависимость изменения коэффициентов коррекции от времени (режим движения № 5)
КМ преодолевает подъем с постоянной скоростью (рис. 35). Моменты на колесах (рис. 36) реализованы в соответствии с коэффициентами коррекции (рис. 38), соответственно, мощность каждого электродвигателя разная (рис. 37). Суммарная мощность (по рис. 37) равна степени использования общей мощности, которую определяет водитель нажатием на педаль «газ». Для данного случая h=80%, соответственно ![]() должно быть 3,84×105 Вт. Если просуммировать все значения мощностей по рис. 37, то в сумме получается 3,84×105 Вт. Энергоэффективность высокая при одновременном обеспечении требуемого уровня динамических свойств.
должно быть 3,84×105 Вт. Если просуммировать все значения мощностей по рис. 37, то в сумме получается 3,84×105 Вт. Энергоэффективность высокая при одновременном обеспечении требуемого уровня динамических свойств.
РЕЖИМ ДВИЖЕНИЯ 5
Закон 2
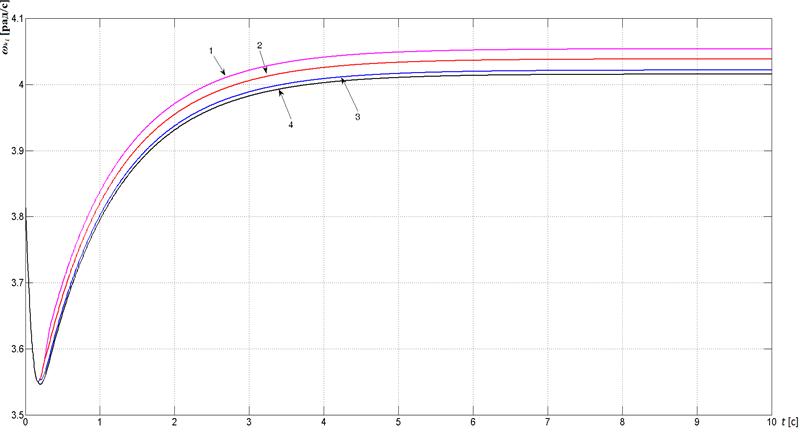
Рис. 39. Зависимости изменения угловых скоростей вращения колес от времени (режим движения 5)
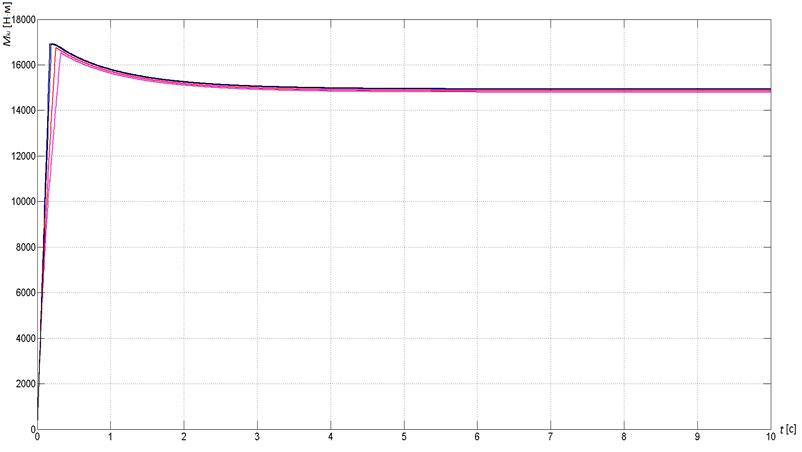
Рис. 40. Зависимости изменения крутящих моментов на колесах от времени (режим движения 5)
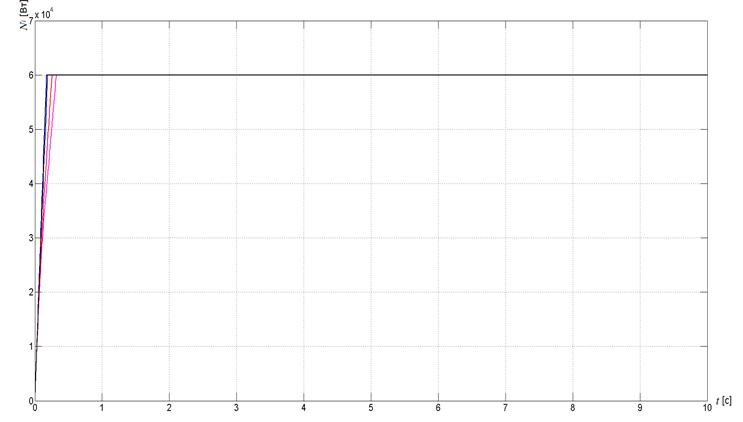
Рис. 41. Зависимости изменения мощности электродвигателей от времени (режим движения 5)

Рис. 42. Зависимость изменения коэффициентов коррекции от времени (режим движения 5)
Перераспределение моментов (рис. 40), так как это необходимо в соответствии с рис. 42, реализовывалось только в совсем маленькой области по времени (дальнейшее перераспределение, как этого «требуют» коэффициенты коррекции (рис. 42) оказалось невозможным в связи с тем, что двигатели выходят на линию максимальной мощности (рис. 41)). Напомним, что нажатие на педаль «газ» в данном случае было 80 %-ым, т.е. дальнейшее воздействие на педаль, например, к увеличению динамики КМ привести не сможет (см. рис. 41). Поскольку перераспределения моментов достичь не удается, то ВМП двигается с повышенными энергозатратами (колеса разгруженных осей больше буксуют, что также подтверждается разницей в угловых скоростях вращения (рис. 39)).
ВЫВОД
Таким образом, анализ результатов математического моделирования движения колесной машины доказывает нецелесообразность применения для транспортных машин закона распределения моментов по колесам, в котором «уставка» по величине требуемого момента, подводимого к колесам прямопропорциональна нажатию водителем на педаль «газ» (зависимость (2)). Гораздо эффективней организация управления тяговыми электродвигателями (ТЭД) из условия, что нажатие на педаль «газ» определяет уровень использования общей мощности всех ТЭД, при этом необходимый момент может быть однозначно определен по выражению (1).
СПИСОК ЛИТЕРАТУРЫ
1. Проектирование полноприводных колёсных машин: учеб. для вузов: В 3 т. Т. 2 / Б.А. Афанасьев, Л.Ф. Жеглов, В.Н. Зузов и др.; Под общ. ред. А.А. Полунгяна. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. – 528 с.: ил.
2. Белоусов Б.Н., Попов С.Д. Колесные транспортные средства особо большой грузоподъемности. Конструкция. Теория. Расчет / под общ. ред. Б.Н. Белоусова. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. – 728 с.
3. Горелов В.А., Котиев Г.О. Прогнозирование характеристик криволинейного движения автомобиля с колесной формулой 6×6 при различных законах управления поворотом колёс задней оси // Изв. ВУЗов. Машиностроение. – 2008. – № 1. –С. 44–55.
4. Котиев Г.О., Чернышев Н.В., Горелов В.А. Математическая модель криволинейного движения автомобиля с колесной формулой 8×8 при различных способах управления поворотом // Журнал ААИ (Журнал автомобильных инженеров). – 2009. – № 2. – С. 34–40.
5. Теория силового привода колес автомобилей высокой проходимости / под общ. ред. д.т.н., проф. С.Б. Шухмана. – М.: Агробизнесцентр, 2007. – 336 с.
6. Котиев Г.О., Горелов В.А., Мирошниченко А.В. Синтез системы управления тяговыми электродвигателями для индивидуального привода ведущих колес автомобиля // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн.– 2011. – №12. – Режим доступа: http://technomag.edu.ru/doc/282533.html (дата обращения 20.08.2012).
7. Горелов В.А., Котиев Г.О., Мирошниченко А.В. Разработка закона управления индивидуальным приводом движителей многоосной колесной машины // Изв. ВУЗов. Машиностроение. - 2012. - № 1. – С. 49-59.
8. Горелов В.А., Котиев Г.О., Мирошниченко А.В. Алгоритм управления индивидуальным приводом колесных движителей транспортных средств // Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. - 2011. – Спец. вып. «Энергетическое и транспортное машиностроение». - С. 39-58.
9. Электрические машины в тяговом автономном электроприводе / Ю.М. Андреев, К.Г. Исаакян, А.Д. Машихин и др.; под ред. А.П. Пролыгина. – М.: Энергия, 1979. – 240 с., ил.
10. Яковлев А.И. Конструкция и расчет электромотор-колес. – М.: Машиностроение, 1970. – 240 с.
11. Козаченко В. Основные тенденции развития встроенных систем управления двигателями и требования к микроконтроллерам // Chip news. – 1999. – № 1. – С. 2–9.
Публикации с ключевыми словами: крутящий момент, угловая скорость, математическая модель, мощность, имитационное моделирование, движитель, закон управления, колесная машина, индивидуальный привод колес
Публикации со словами: крутящий момент, угловая скорость, математическая модель, мощность, имитационное моделирование, движитель, закон управления, колесная машина, индивидуальный привод колес
Смотри также:
- Разработка закона распределения моментов по колесам многоосной колесной машины с электро-механической трансмиссией, выполненной по схеме «мотор-ось»
- Имитационное моделирование динамики прямолинейного движения колесной машины настенде "Беговые барабаны"
- 77-30569/282533 Синтез системы управления тяговыми электродвигателями для индивидуального привода ведущих колес автомобиля
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||