научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 04, апрель 2012
УДК 004.414.2
МГТУ МИРЭА
Введение
С развитием электроники наблюдается тенденция увеличения степени интеграции и миниатюризации электронных компонентов и печатных плат. Возрастает возможность ошибок проектирования и производства и усложняется процесс верификации устройств как на этапе проектирования, так и на этапе проверки качества произведенных устройств. Ошибки проектирования и производства компонентов и устройств ведут к потерям экономического характера. На их поиск и решение тратится огромное количество времени, что приводит к значительному увеличению финансирования на проектирование устройств, увеличению стоимости готовых изделий и снижению их конкурентоспособности. Все вышеизложенное заставляет производителей все больше внимания уделять тестопригодности разрабатываемых изделий [1].
Одним из эффективных решений задач тестопригодного проектирования является применение технологии граничного сканирования. Она была разработана в 80-х годах группой JointTestAutomationGroup (JTAG – объединенной группой по автоматизации тестирования) и впервые стандартизована в 1990 году (IEEEStd. 1149.1 TestAccessPortandBoundary-ScanArchitecture). Последняя версия стандарта была опубликована в 2001 году [2].
Постановка задачи
До появления стандарта существовали различные подходы к обеспечению тестирования. Одним из таких подходов было внутрисхемное тестирование (In-Circuittesting - ICT), обеспечивающее доступ к цепям печатных плат с помощью пробников (контактных иголок). Внутрисхемное тестирование требует наличие на платах специальных контактных площадок. В связи со все возрастающей плотностью компоновки и использованием многослойных печатных плат, а также проблемами отладки, связанными с уникальностью каждого нового типа изделия, осуществление такого подхода сталкивается со все большими проблемами. Одним из главных преимуществ граничного сканирования является обеспечение стандартного механизма решения проблем тестирования для разных задач электронной промышленности [3].
Cо времени опубликования стандарта технология граничного сканирования (Boundary Scan - BS) утвердила себя как незаменимый инструмент при тестировании устройств c ограниченным доступом к выводам ИС. Широкое применение многослойных печатных плат с ИС в корпусах, изготовленных по технологиям BGA, COB и QFP, дало новый мощный импульс развитию и повсеместному применению этой технологии. Граничное сканирование используется также как средство доступа к внутренним регистрам микросхем для наблюдения за их состоянием в процессе отладки электронных плат. Исключительно широко технология BS применяется также для внутрисхемного программирования (On-Board Programming - OBP), одним из направлений которого является внутрисистемное программирование (ISP – In System Programming) [4].
В работе поставлена задача синтеза модели легко интегрируемого в различные компоненты блока, совместимого со стандартом IEEEStd. 1149.1-2001 и обеспечивающего таким устройствам доступ к возможностям граничного сканирования.
Архитектура тестового окружения
Блок поддержки граничного сканирования разработан в виде программного IP-ядра, специфицированного в качестве RTL-модели на языке описания аппаратуры VerilogHDL, стандартизированного как IEEEStd. 1364-2001 [5]. Блок обеспечиваетполнуюсовместимостьсостандартом IEEE Std. 1149.1 Test Access Port and Boundary-Scan Architecture [2].
Базовая архитектура тестовой логики включает в себя следующие элементы (рис.1):
· Порт тестирования ТАР (Test Access Port);
· ТАР контроллер;
· Регистр команд;
· Набор тестовых регистров данных.
Операцией тестирования руководит ТАР контроллер, работа которого осуществляется с помощью сигналов, подаваемых по линиям TMS, TCKи, опционально, TRST. Под управлением контроллера через порт ТАР в регистр команд последовательно сдвигается код команды для исполнения. Команда декодируется, и, в зависимости от команды, декодером выбирается нужный регистр данных для подключения его между выводами TDI и TDOпорта ТАР. Выработка управляющих сигналов для регистров данных осуществляется ТАР контроллером и декодером команд. В зависимости от команды, тестовые данные могут быть сдвинуты в соответствующий регистр через вывод TDI, пропущены через регистр обхода (bypass) на вывод TDO. Результаты тестирования и значения регистра идентификации также могут быть выдвинуты на вывод TDO под управлением ТАР контроллера и декодера команд.
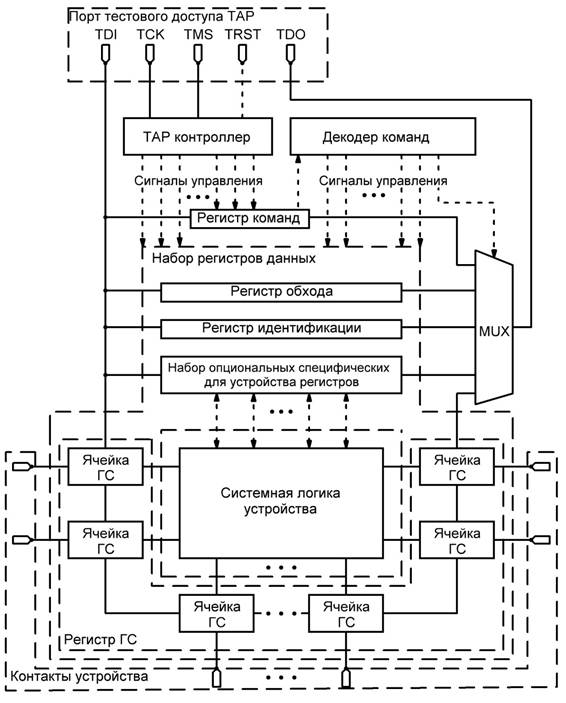
Рис. 1. Базовая архитектура тестовой логики
Порт тестирования TAP состоит из четырех обязательных и одной опциональной последовательных линий:
· TCK (Test Clock Input)– входная линия синхросигнала, управляющего всей тестирующей логикой;
· TMS (Test Mode Select Input) – входная линия сигнала управления операцией тестирования;
· TDI (TestDataInput) – входная линия сигнала тестовых данных;
· TDO (TestDataOutput) – выходная линия сигнала тестовых данных;
· TRST (TestResetInput) – опциональная входная линия ассинхронного сброса контроллера TAP.
ТАР контроллер представляет собой синхронный конечный автомат, реагирующий на изменения сигналов TCKи TMS и контролирующий последовательность операций схемы тестирования.
Машина состояний TAPконтроллера приведена на рис. 2.

Рис. 2. Машина состояний TAP контроллера
Машину состояний условно можно разделить на две части: для доступа к регистру команд (SelectIR) и для доступа к регистру данных (SelectDR). Первая часть реализует три основные состояния, в которых происходит работа с регистром команд: CaptureIR, ShiftIR, UpdateIR. В состоянии CaptureIRна теневой сдвиговый регистр загружается константа, состоящая из двоичной последовательности 01. В состоянии ShiftIRэто значение выдвигается на выходную линию TDO, при этом новое значение задвигается с линии TDI. В состоянии UpdateIRновое значение с теневого регистра фиксируется на регистре команд через параллельный выход теневого регистра. Вторая часть реализует три основные состояния, в которых происходит работа с регистром данных: CaptureDR, ShiftDR, UpdateDR. CaptureIR, ShiftIR, UpdateIR. В состоянии CaptureIRна теневой сдвиговый регистр загружаются значения диагностируемых сигналов. В состоянии ShiftIRэто значение выдвигается на выходную линию TDO, при этом новое значение задвигается с линии TDI. В состоянии UpdateIRновое значение с теневого регистра фиксируется на регистре данных через параллельный выход теневого регистра.
Остальные состояния ветвей доступа диаграммы являются либо временными, для перехода между основными состояниями (Exit1IR, Exit1DR, Exit2IR, Exit2DR), либо позволяют временно прервать работу тестирующей логики с последующим ее возобновлением (PauseIR, PauseDR). В состоянии Test-Logic-Reset тестовая логика отключена. Это состояние инициализации контроллера, в которое переходит контроллер после получения сигнала сброса на опциональной линии TRST.
Ниже перечислен набор тестовых регистров данных, которые либо должны быть обязательно включены в тестовую логику, либо могут быть включены опционально:
· Регистр граничного сканирования (Boundary-ScanRegister, BSR);
· Регистр обхода (Bypass Register);
· Идентификационный регистр (Idcode Register);
· Специфические регистры конкретного устройства.
Минимально набор должен включать регистр граничного сканирования и регистр обхода bypass. Регистр граничного сканирования представляет собой сдвиговый регистр, состоящий из специальных ячеек граничного сканирования (Boundary-ScanCell, BSC), подключаемых между внешними выводами устройства и его системной логикой. Ячейки могут пропускать через себя сигналы (и могут сохранять значения пропускаемых сигналов) или могут прекращать пропуск сигналов и устанавливать тестовые значения, полученные через порт ТАР на внешние выходы или на системную логику устройства. Регистр обхода представляет собой однобитовый сдвиговый регистр, позволяющий создать кратчайший путь между выводами TDIи TDOпорта ТАР. Идентификационный регистр представляет собой сдвиговый регистр, содержащий 32-х битный двоичный код, позволяющий определить производителя устройства, его серийный номер и версию. Также для устройств, программируемых пользователем, в идентификационный регистр возможна запись пользовательского 32-х битного идентификационного кода. Специфические регистры могут быть включены разработчиком устройства для поддержки специфических режимов тестирования, не определенных стандартом.
Команды, которые могут выполняться тестирующей логикой, условно можно разделить на несколько групп:
· Минимальный обязательный набор команд тестирования: BYPASS, EXTEST, SAMPLE, PRELOAD;
· Опциональный набор команд регистра идентификации: IDCODE, USERCODE;
· Опциональный набор команд тестирования: INTEST, RUNBIST, CLAMP, HIGHZ.
Команда BYPASS подключает между линиями TDI и TDO регистр обхода (bypassregister) и не влияет на работу системной логики устройства. Команда EXTESTподключает между линиями TDI и TDO регистр граничного сканирования и позволяет проверить исправность внешних соединений устройства, системная логика при этом отключается от внешних соединений. Команда PRELOADпозволяет последовательно загрузить данные для тестирования в регистр граничного сканирования и захватить их. Команда SAMPLEпозволяет зафиксировать в регистре граничного сканирования данные с внешних линий устройства, тем самым получив их значения в рабочем режиме для последующего анализа.
Команды регистра идентификации позволяют получить доступ к регистру идентификации, если он включен в тестовую логику. Команда IDCODEвызывает загрузку в регистр идентификации предусмотренного производителем идентификационного кода и последовательно выдвигает его с линии TDO. Команда USERCODEпозволяет загрузить в идентификационный регистр определенный пользователем идентификационный код. Данная инструкция требуется, только если компонент программируется пользователем.
Команда INTESTподключает между линиями TDI и TDO регистр граничного сканирования и позволяет проверить исправность работы системной логики путем воздействия на нее сигналами, находящимися в регистре граничного сканирования. Результат тестирования затем фиксируется в регистре граничного сканирования. Команда RUNBISTпозволяет активизировать встроенную в устройство собственную схему тестирования и не нуждается в предварительной загрузке внешних данных на регистр граничного сканирования. Команда CLAMPподключает между линиями TDI и TDO регистр обхода (bypassregister) и устанавливает на выходные линии устройства сигналы, определяемые регистром граничного сканирования. Команда HIGHZподключает между линиями TDI и TDO регистр обхода (bypassregister) и устанавливает выходные линии устройства в Z состояние (высокого импеданса).
Блок поддержки механизма граничного сканирования
RTL модель блока разработана с помощью языка описания аппаратуры Verilog. На рис.3 представлен фрагмент кода описания машины состояний ТАР контроллера для разработанного модуля.
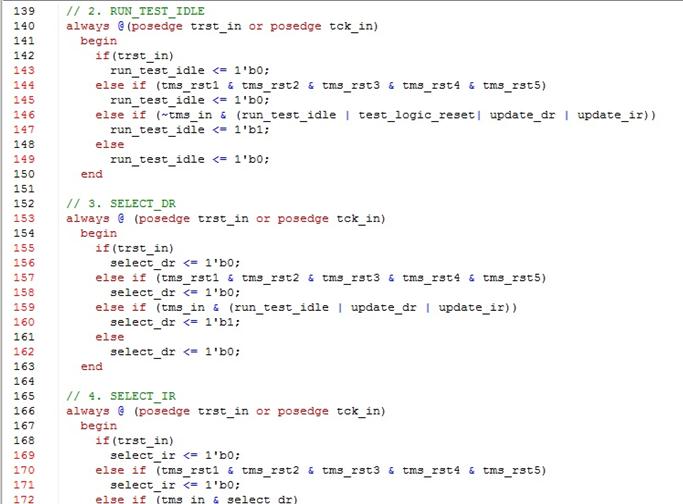
Рис. 3. Фрагмент кода описания машины состояний ТАР контроллера
Так как стандартом определены не только обязательные команды (BYPASS, SAMPLE, PRELOAD, EXTEST), но и опциональные команды (INTEST, IDCODE, USERCODE, RUNBIST, CLAMP, HIGHZ), а также из-за отсутствия четких требований к двоичным кодам команд со стороны стандарта, было принято решение реализовать параметризуемую модель. Параметризация реализуется при помощи механизма макроопределений языка Verilog. В качестве параметров выступает список опциональных команд, а также двоичные коды команд. Данное решение позволяет разработчику конечного устройства привести блок поддержки граничного сканирования в соответствие с требованиями его проекта, варьировать объем поддерживаемых опциональных команд, двоичные коды, задающие эти команды. При отсутствии необходимости в некоторых опциональных командах может быть достигнута экономия ресурсов компонентов, выражающаяся в уменьшении избыточности, вносимой в проект тестовой логикой.
В общем случае (при поддержке всех описанных в стандарте команд), структурная схема блока имеет следующий вид ( рис. 4).
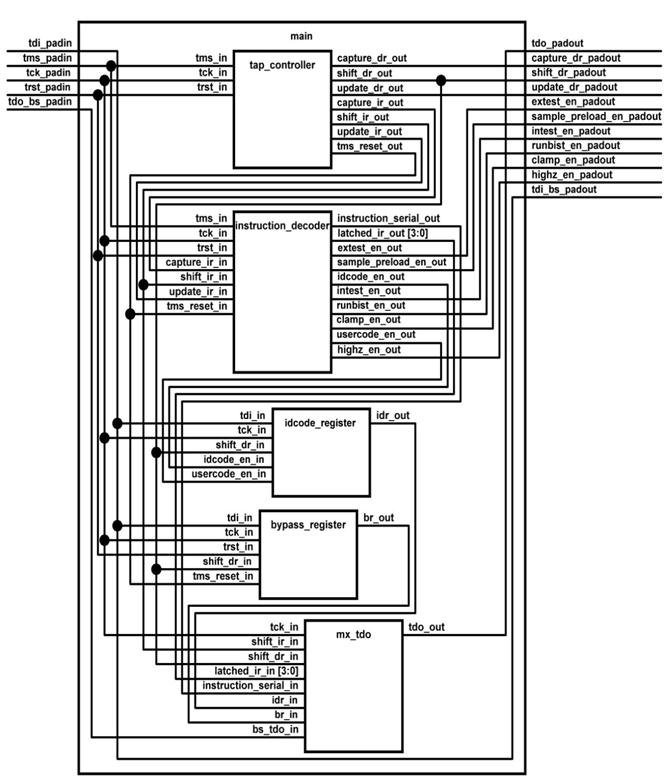
Рис. 4. Структурная схема блока поддержки граничного сканирования
Структурная схема блока поддержки граничного сканирования включает в себя пять модулей:
· tap_controller,
· instruction decoder,
· idcode_register,
· bypass_register,
· mx_tdo.
Модуль tap_controller реализует контроллер управления портом тестирования и содержит синхронный конечный автомат, диаграмма которого представлена на рис. 2 .
Модуль в ответ на сигналы, приходящие по линиям порта ТАР (TCK, TMS, TRST), вырабатывает шесть сигналов, соответствующих основным рабочим состояниям машины состояний: capture_dr, shift_dr, update_dr, capture_ir, shift_ir, update_ir. Также модуль вырабатывает сигнал tms_reset, соответствующий пяти высоким состояниям сигнала TMS по восходящему фронту TCK.
Модуль instruction_decoder реализует 4-х разрядный регистр команд и декодирующую логику. Под управлением модуля tap_controller (сигналы capture_ir, shift_ir, update_ir, tms_reset) и сигнала порта ТАР (TRST) с линии порта TDI в регистр команд последовательно сдвигается двоичный код команды для исполнения и фиксируется в нем на время исполнения команды. Исходя из значения кода команды, модуль вырабатывает сигналы разрешения выполнения команд (extest_en, sample_preload_en, idcode_en, intest_en, runbist_en, clamp_en, usercode_en, clamp_en) и подает их на соответствующие регистры данных. Модуль имеет последовательный выход instruction_serial для содержимого регистра команд, который подается на вход данных мультиплексора mx_tdo выходных данных и 4-х разрядный параллельный выход для зафиксированной исполняющейся команды, которая подается на управляющий вход мультиплексора mx_tdo.
Модуль idcode_register реализует идентификационный регистр. Модуль управляется сигналами порта ТАР (TCK), модуля tap_controller (shift_dr) и модуля instruction_decoder (сигналы разрешения команд idcode_en, usercode_en). В зависимости от выполняемой команды, модуль может параллельно загрузить на сдвиговый 32-х разрядный регистр идентификационный код производителя и последовательно выдвинуть его на выход idr, подключенный к мультиплексору выходных данных (команда IDCODE), или сохранить на регистре-защелке предварительно загруженный на этот сдвиговый регистр пользовательский 32-х разрядный идентификационный код (команда USERCODE).
Модуль bypass_register реализует одноразрядный сдвиговый регистр обхода. Модуль управляется сигналами порта TAP (TCK, TRST) и модуля tap_controllera (shift_dr, tms_reset) и служит для пропуска тестовых данных с линии TDI на линию TDO по кратчайшему пути.
Модуль mx_tdo служит для мультиплексирования выходов регистров данных и регистра команд (instruction_serial, idr, br, bs_tdo) на выходную линию порта TAPTDO. На управляющие входы мультиплексора подается фиксированная для исполнения команда (через 4-х разрядный вход latched_ir). Данные подаются на выход мультиплексора только в состоянии ТАР контроллера ShiftDR или ShiftIR. Во всех остальных состояниях модуль устанавливает выход в Z-состояние, как того требует стандарт.
Результаты моделирования
Моделирование описанного выше блока было произведено в системе моделирования и верификации ModelSim компании MentorGraphics. Ниже (рис. 5 и рис. 6) приведены временные диаграммы, поясняющие последовательность выполнения команд тестирования при помощи технологии граничного сканирования. Вертикальные линии на диаграммах приведены для указания перехода конечного автомата ТАР контроллера между отдельными состояниями в процессе операции тестирования.
Входные данные фиксируются со входов порта ТАР по восходящему фронту синхросигнала (tck_padin). Вывод данных осуществляется по нисходящему фронту синхросигнала.
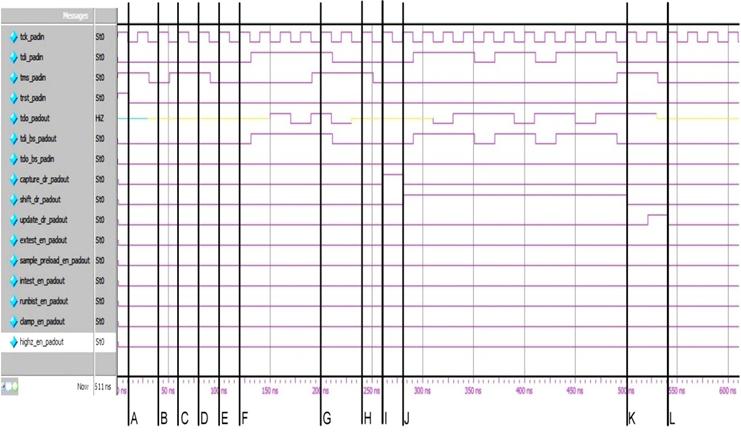
Рис. 5. Временная диаграмма выполнения команды BYPASS
Временная диаграмма выполнения команды BYPASS представлена на рис. 5. Ниже приведены пояснения к ней:
· В точке А ТАР контроллер находится в состоянии Test-Logic\Reset.
· В точке B на линии TMS фиксируется низкий уровень сигнала и контроллер переходит в состояние Run-Test\Idle.
· В точке С по высокому уровню TMS контроллер переходит в состояние SelectDR.
· В точке D по высокому уровню TMS контроллер переходит в состояние SelectIR.
· В точке E по низкому уровню TMS контроллер переходит в состояние CaptureIR. На сдвиговый регистр команд загружается двоичная последовательность 0101 (как того требует стандарт).
· В точке F по низкому уровню TMS контроллер переходит в состояние ShiftIR. Новый двоичный код команды последовательно загружается на регистр команд (1111 – команда BYPASS) по восходящему фронту TCK. По нисходящему фронту TCK с регистра команд на выход TDO выдвигается двоичная последовательность 0101.
· В точке G на вход TMS последовательно поступают две логические единицы. ТАР контроллер переходит через состояние Exit1IR в состояние UpdateIR и команда, сдвинутая на регистр команд, фиксируется для исполнения. Между выводами порта ТАР TDI и TDO подключается одноразрядный сдвиговый регистр обхода.
· В точке H по высокому уровню сигнала на входе TMS ТАР контроллер переходит в состояние SelectDR.
· В точке I по низкому уровню сигнала на входе TMS ТАР контроллер переходит в состояние CaptureDR.
· В точке J по низкому уровню сигнала на входе TMS ТАР контроллер переходит в состояние ShiftDR. По восходящему фронту TCK тестовая последовательность (01110110111) с линии TDI задвигается в регистр обхода, по нисходящему фронту TCK через такт она выдвигается на линию TDO.
· В точке K на вход TMS последовательно поступают две логические единицы. ТАР контроллер переходит через состояние Exit1DR в состояние UpdateDR.
· В точке L по низкому уровню сигнала на входе TMS ТАР контроллер переходит в состояние Run-Test\Idle и остается в нем, пока с линии TMS по восходящему фронту TCK не поступит логическая 1.
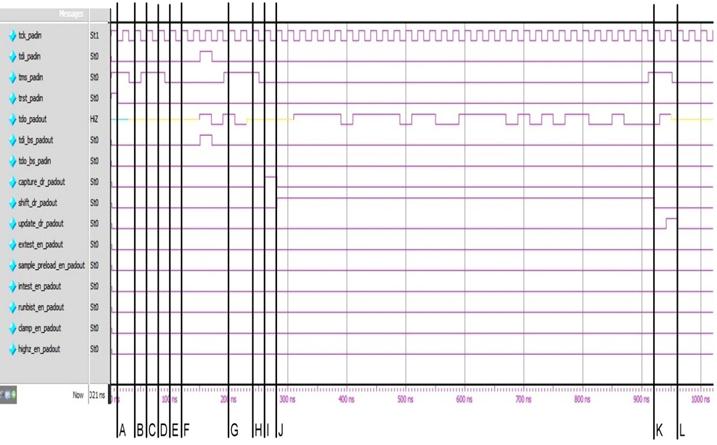
Рис. 6. Временная диаграмма выполнения команды IDCODE
На рис. 6 приведена временная диаграмма выполнения команды IDCODE. Выполнение команды IDCODE аналогично выполнению команды BYPASS за исключением:
· В точке F загружается двоичный код команды IDCODE (1000).
· В точке G между TDI и TDO подключается 32-х разрядный регистр идентификации.
· В точке I на сдвиговый регистр идентификации загружается двоичный 32-х разрядный идентификационный код производителя (для примера взят код 8’h89ABCDEF).
· В точке J на линию TDO последовательно выдвигается двоичный идентификационный код.
Методика конфигурирования блока
Ниже приведена методика конфигурирования блока под конкретные требования разработчика:
1. Провести анализ разрабатываемого проекта на возможность и необходимость использования опциональных команд тестирования. Определить двоичные коды команд тестирования.
2. Отредактировать состав макроопределений блока в соответствии с полученными данными. Все макроопределения вынесены в отдельный файл конфигурации блока и доступны для редактирования (рис. 7).
3.
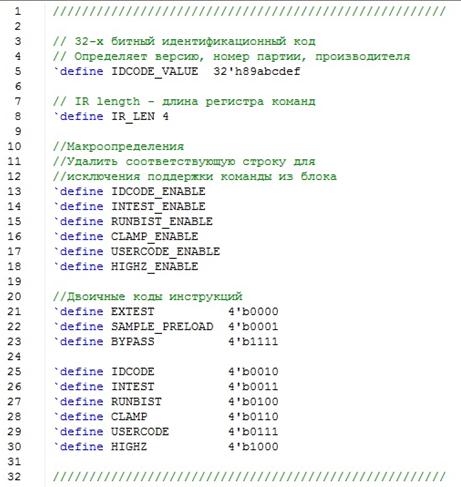
Рис. 7. Файл конфигурации блока
4. В зависимости от требований, предъявляемых к проекту, разработчик может включить в состав блока дополнительные специфические регистры данных и поддержку команд, не описанные в стандарте.
5. При проектировании конечного устройства необходимо предусмотреть избыточность, вносимую блоком и предназначенную для поддержки граничного сканирования. К избыточности относятся: дополнительные выводы для организации порта тестирования, ресурсы для организации самого блока поддержки тестирования, ячейки граничного сканирования для построения регистра BSR и связи между этими компонентами.
6. Включить блок в иерархию проекта конечного устройства, к выводам устройства подключить соответствующие их типу наборы ячеек граничного сканирования
Заключение
Рассмотренная в рамках данной статьи модель многофункционального блока поддержки механизма граничного сканирования может быть легко встроена в проект разработчиками при проектировании широкого спектра устройств для обеспечения их тестопригодности. Поддержка блоком всех описанных в стандарте команд расширяет возможности его применения в самых различных проектах цифровых устройств.
Предложенный и реализованный механизм выбора поддерживаемых блоком опциональных команд стандарта, возможность изменения двоичного кода, определяющего команды при помощи макроопределений, позволяет гибко сконфигурировать блок под конкретные требования разработчика и избавиться на этапе синтеза (имплементации) от лишних для конкретной реализации элементов.
Литература
1. Городецкий А., Курилан Л. Тестопригодное проектирование схем для граничного сканирования. // Производство электроники. 2008, №1. URL: http://www.elproduct.ru/ (дата обращения: 05.12.2011).
2. IEEE Standard Test Access Port and Boundary-Scan Architecture, IEEE Computer Society, IEEE, New York, NY, IEEE Std 1149.1 - 2001.
3. Parker, Kenneth P. The Boundary-Scan Handbook Second Edition: Analog and Digital. - New York: Kluwer Academic Publishers, 2002. – 288 p.
4. Рустинов В., Городецкий А. «Разделяй и властвуй» - принцип граничного сканирования. // ChipNews 2001, №6. URL: http://www.chipinfo.ru/literature/chipnews/200106/4.html (дата обращения: 05.12.2011).
- IEEE Standard Verilog Hardware Description Language, IEEE Computer Society, IEEE, New York, NY, IEEE Std 1364 - 2001.
Публикации с ключевыми словами: тестирование, граничное сканирование, моделирование цифровых схем
Публикации со словами: тестирование, граничное сканирование, моделирование цифровых схем
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||