научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 11, ноябрь 2011
УДК 621.31(075.8)
МГТУ им. Н.Э.Баумана
Электростатические подвесы (ЭСП) применяются для прецизионного центрирования подвижных систем приборов. Практическое использование неконтактного взвешивания тел посредством ЭСП ограничивается пока в основном подвесом чувствительных элементов в гироскопах и акселерометрах, но уже делаются попытки более широкого его применения в других областях приборостроения.
Подвес подвижных частей приборов в ЭСП достигается путем силового взаимодействия заряженных проводников, образующих электродную систему, и проводящей поверхности взвешиваемого тела. Конфигурация электродной системы имеет прямую связь с геометрией взвешиваемых тел, поэтому применение нашли сферические (для электростатических гироскопов (ЭСГ)) и цилиндрические (для поплавковых акселерометров) подвесы, в которых рабочими поверхностями электродов служат части сферической или цилиндрической поверхностей, разделенных изолирующими промежутками.
На рис. 1 а, б показаны основные элементы, составляющие сферические электростатические подвесы (СЭСП) с электродами в виде сферических сегментов и с электродами в виде сферических треугольников. Цилиндрический электростатический подвес (ЦЭСП) представлен на рис. 1 в.

Рис. 1. Условные схемы сферического и цилиндрического подвеса
Взвешиваемое тело (ротор подвеса) окружено системой электродов, представляющих собой тонкие металлизированные площадки, расположенные на внутренней поверхности корпуса.
Сферические электростатические подвесы, работающие в вакуумной среде, выполняют функции единственного центрирующего элемента, поэтому главное внимание необходимо уделять обеспечению устойчивости подвеса в условиях перегрузок при сохранении электрической прочности рабочего зазора. При проектировании подвесов этого типа большое значение имеют сведения об их работе в ЭСГ. Принято различать типы ЭСГ по точности, причислив к приборам высокой точности конструкции с полыми роторами больших диаметров (40…60 мм) и средней точности со сплошными роторами малых диаметров (10…20 мм).
В поплавковых акселерометрах подвижная система содержит два цилиндрических поплавка, которые служат для обеспечения гидростатической разгрузки. Поверхности поплавков могут быть использованы в качестве роторов электростатических подвесов, выполняющих функции дополнительных прецизионных элементов центрирования подвижной системы. В отличие от вакуумных подвесов, в поплавковых подвесах демпфирование реализуется посредством вязкой жидкости, что облегчает достижение устойчивого взвешивания.
Электростатический подвес включает в себя несколько каналов стабилизации. Каждый канал подключен к паре диаметрально противоположных электродов и осуществляет стабилизацию по оси, на которой расположены эти электроды. Так, например, в цилиндрическом подвесе таких каналов пять. В сферическом подвесе число каналов в зависимости от конфигурации электродной системы равно трем или четырем. В большинстве практических схем подвесов одни и те же электроды используются и для силообразования, и для измерения перемещений. Использование раздельных электродов, особенно для подвесов с роторами малых диаметров, вызывает как технологические трудности при изготовлении электродной системы, так и потерю эффективности подвеса. В связи с этим, будем рассматривать только подвесы с совмещенными силообразующими и измерительными электродами.
В настоящее время достаточно хорошо изучены и практически реализованы аналоговые подвесы на постоянном токе (с раздельными электродами), использующие для измерения смещений ротора аналоговые емкостные датчики мостового типа, а для формирования управляемых напряжений на электродах - высоковольтные усилители постоянного тока [1]. Повышение требований к стабильности центрирования привело к необходимости применения подвесов с импульсным регулированием высоковольтных потенциалов на электродах.
Первоочередная проблема, с которой пришлось столкнуться при разработке импульсных подвесов – плохая совместимость импульсных высоковольтных каскадов и аналоговых датчиков перемещения. Это привело к необходимости применения датчиков совмещенного типа. В частности, в [2] предложен способ организации датчика, основанный на измерении суммы напряжений с диаметрально противоположных электродов подвеса в моменты времени заряда-разряда ротор-электродных емкостей с последующим стробированием ее в заданные моменты времени. Дальнейшее увеличение стабильности и точности центрирования, улучшение эксплуатационных характеристик связано с переходом к цифровым подвесам. Однако применение цифрового регулирования в электростатических подвесах наталкивается на ряд проблем, основной из которых является высокие (сотни герц) собственные частоты роторов.
Существуют зарубежные публикации (в основном патентного характера), посвященные цифровым подвесам. Однако они носят описательный характер, в них нет строгого обоснования структур регуляторов и выбора их параметров. До настоящего момента времени практически отсутствуют отечественные работы, посвященные данной проблеме. Это подтверждает актуальность исследования.
Целью данной работы является выбор структур цифровых регуляторов, обеспечивающих устойчивую работу подвеса, расчет предельно достижимой (с точки зрения технической реализации) частоты квантования в электростатических подвесах с ШИМ, а также определение минимальных частот квантования при которых подвес сохраняет устойчивость.
На рис. 2 показана функциональная схема цифровой системы стабилизации электростатического подвеса с управлением высоковольтными потенциалами на электродах по принципу ШИМ.
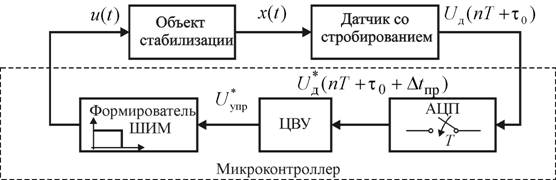
Рис. 2. Функциональная схема цифрового подвеса
Выходные аналоговые сигналы датчиков перемещения, зафиксированные в устройствах выборки-хранения (УВХ) в моменты времени ![]() при помощи аналого-цифрового преобразователя (АЦП) преобразуются в цифровой сигнал
при помощи аналого-цифрового преобразователя (АЦП) преобразуются в цифровой сигнал ![]() . Здесь
. Здесь ![]() - период ШИМ,
- период ШИМ, ![]() - время преобразования сигнала. Далее сигнал обрабатывается в цифровом вычислительном устройстве (ЦВУ) в соответствии с заложенным в нем алгоритмом (дискретная коррекция) и преобразуется в импульсы ШИМ.
- время преобразования сигнала. Далее сигнал обрабатывается в цифровом вычислительном устройстве (ЦВУ) в соответствии с заложенным в нем алгоритмом (дискретная коррекция) и преобразуется в импульсы ШИМ.
При проектировании цифровых подвесов возникает проблема выбора периода дискретизации ![]() и параметров дискретного корректирующего устройства. Для того чтобы понять, какие ограничения налагаются на эти параметры, предварительно рассмотрим работу аналогово-импульсного подвеса с ШИМ. Принципиальная схема подвеса [2] показана на рис. 3, временные диаграммы, поясняющие ее работу, приведены на рис. 4.
и параметров дискретного корректирующего устройства. Для того чтобы понять, какие ограничения налагаются на эти параметры, предварительно рассмотрим работу аналогово-импульсного подвеса с ШИМ. Принципиальная схема подвеса [2] показана на рис. 3, временные диаграммы, поясняющие ее работу, приведены на рис. 4.
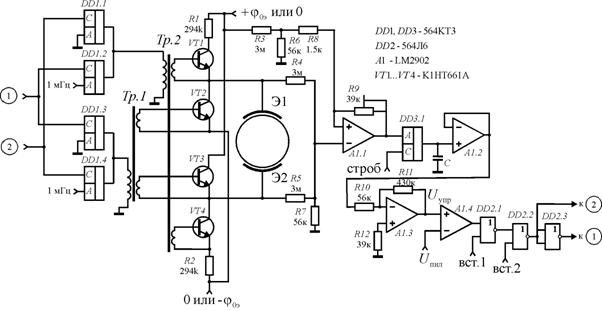
Рис. 3. Принципиальная схема импульсного подвеса
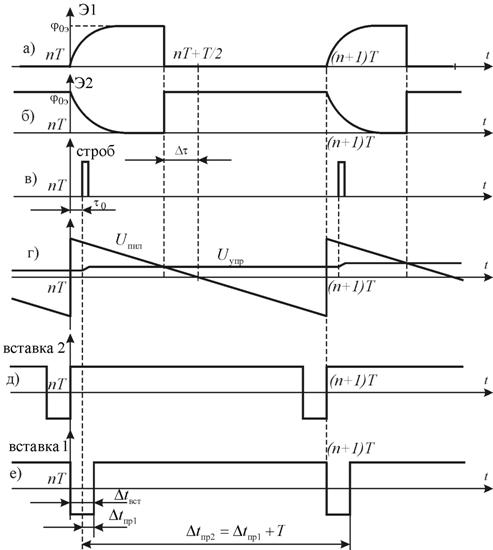
Рис. 4. Временные диаграммы работы импульсного подвеса
Коротко остановимся на описании принципа действия рассматриваемого подвеса. Предположим, что произошло смещение ротора по направлению к электроду Э1. Высоковольтные каскады подвеса (транзисторы VT1 – VT4 и управляющие трансформаторы Тр.1, Тр.2) построены таким образом, что в начале каждого периода происходит заряд ротор-электродной емкости Э1 и разряд емкости Э2, рис. 4 а, б. Информация о смещении ротора заложена в сумме напряжений с электродов, измеряемой в фиксированный относительно начала каждого периода момент ![]() . В это время схема управления подвеса (на рис. 3 не показана) вырабатывает строб опроса датчика перемещений, рис. 4 в. Напряжение датчика в моменты времени
. В это время схема управления подвеса (на рис. 3 не показана) вырабатывает строб опроса датчика перемещений, рис. 4 в. Напряжение датчика в моменты времени ![]() запоминается в УВХ (ключ DD3.1, емкость С, повторитель А1.2), усиливается (корректирующее звено, обеспечивающее устойчивость подвеса на данной схеме не показано) и сравнивается с пилообразным напряжением, рис. 4 г. Выходной сигнал компаратора А1.4 складывается на логических элементах DD2.1, DD2.2 с импульсами вставок, рис. 4 д, е, и поступает далее на ключевые схемы DD1.1- DD1.4 управления высоковольтными каскадами. В результате длительность высоковольтного импульса на электроде Э1 уменьшается, а на электроде Э2 – увеличивается, что и создает соответствующую восстанавливающую силу подвеса, возвращающую ротор в центральное положение.
запоминается в УВХ (ключ DD3.1, емкость С, повторитель А1.2), усиливается (корректирующее звено, обеспечивающее устойчивость подвеса на данной схеме не показано) и сравнивается с пилообразным напряжением, рис. 4 г. Выходной сигнал компаратора А1.4 складывается на логических элементах DD2.1, DD2.2 с импульсами вставок, рис. 4 д, е, и поступает далее на ключевые схемы DD1.1- DD1.4 управления высоковольтными каскадами. В результате длительность высоковольтного импульса на электроде Э1 уменьшается, а на электроде Э2 – увеличивается, что и создает соответствующую восстанавливающую силу подвеса, возвращающую ротор в центральное положение.
В рассмотренной схеме подвеса наличие вставок является принципиальным моментом. Их присутствие не позволяет импульсам ШИМ на электродах подвеса выродиться в постоянные уровни. Это может случиться при выходе ротора из линейной зоны регулирования, когда напряжение управления ![]() на входе компаратора превысит амплитуду пилообразного сигнала.
на входе компаратора превысит амплитуду пилообразного сигнала.
Какие ограничения налагаются на длительность импульсов вставок? Рассматривая временные диаграммы, рис. 4, можно отметить, что длительность вставки![]() не может быть меньше
не может быть меньше![]() . Максимальная крутизна датчика достигается, когда величина
. Максимальная крутизна датчика достигается, когда величина ![]() равна постоянной времени заряда ротор-электродных емкостей при центральном положении ротора
равна постоянной времени заряда ротор-электродных емкостей при центральном положении ротора ![]() , где
, где ![]() и
и ![]() входные емкости со стороны электродов Э1 и Э2 соответственно, а
входные емкости со стороны электродов Э1 и Э2 соответственно, а ![]() и
и ![]() - резисторы, через которые осуществляется заряд. При типовом для электростатических подвесов значении емкостей 20 – 40 пФ и величине зарядного резистора 300 кОм
- резисторы, через которые осуществляется заряд. При типовом для электростатических подвесов значении емкостей 20 – 40 пФ и величине зарядного резистора 300 кОм ![]() . Уменьшение
. Уменьшение![]() и
и ![]() ниже 100 кОм не рекомендуется из-за возрастания энергопотребления подвеса. С другой стороны, величина
ниже 100 кОм не рекомендуется из-за возрастания энергопотребления подвеса. С другой стороны, величина ![]() должна быть в несколько раз больше длительности строба (0,5 – 1 мкс). Таким образом, минимальное значение
должна быть в несколько раз больше длительности строба (0,5 – 1 мкс). Таким образом, минимальное значение ![]() можно оценить в 4 – 5 мкс, а минимальное значение длительности вставки, в которую кроме
можно оценить в 4 – 5 мкс, а минимальное значение длительности вставки, в которую кроме ![]() и длительности строба необходимо включить задержку отпирания – запирания высоковольтных транзисторов, можно оценить в 10 мкс.
и длительности строба необходимо включить задержку отпирания – запирания высоковольтных транзисторов, можно оценить в 10 мкс.
Длительность вставки должна быть ограничена сверху, так как ее наличие снижает максимальное приращение импульсов ШИМ на электродах подвеса до величины ![]() . Если принять, что вставка не может быть больше приращения
. Если принять, что вставка не может быть больше приращения ![]() , то предельный период ШИМ можно оценить в 40 мкс, а частоту ШИМ – в 25 кГц. В цифровом подвесе импульсы вставок реализуются программно, но на их длительность накладываются те же самые ограничения.
, то предельный период ШИМ можно оценить в 40 мкс, а частоту ШИМ – в 25 кГц. В цифровом подвесе импульсы вставок реализуются программно, но на их длительность накладываются те же самые ограничения.
Рассмотрим теперь цикл работы цифрового подвеса. Очевидно, что работа АЦП не может начаться ранее окончания импульса строба. Обозначим ![]() - время работы аналого-цифрового преобразователя и
- время работы аналого-цифрового преобразователя и ![]() - время, необходимое на дискретную коррекцию. Тогда минимальный цикл преобразования
- время, необходимое на дискретную коррекцию. Тогда минимальный цикл преобразования ![]() можно оценить как
можно оценить как ![]() .
.
Здесь возможны два существенных для работы подвеса варианта. В первом из них цикл преобразования удается завершить до окончания импульса вставки ![]() , где
, где ![]() (см. рис. 4 е). В этом случае приращение импульса ШИМ
(см. рис. 4 е). В этом случае приращение импульса ШИМ ![]() на участке
на участке ![]() вычисляется и устанавливается на основе сигнала датчика перемещений этого же участка. При втором варианте, в силу недостаточной скорости обработки, цикл преобразования
вычисляется и устанавливается на основе сигнала датчика перемещений этого же участка. При втором варианте, в силу недостаточной скорости обработки, цикл преобразования ![]() . Для этого случая цикл преобразования может быть уже расширен до величины
. Для этого случая цикл преобразования может быть уже расширен до величины ![]() , но приращение
, но приращение![]() на участке
на участке ![]() формируется на основе информации предыдущего периода
формируется на основе информации предыдущего периода ![]() . Во втором случае происходит задержка информации в контуре стабилизации на один период квантования.
. Во втором случае происходит задержка информации в контуре стабилизации на один период квантования.
Еще одна особенность цифрового управления подвесом – выбор разрядности преобразования, которую должен обеспечивать микроконтроллер. Проведем оценку разрядности на примере подвеса с сегментными электродами, рис. 1 а, в котором зазор между электродами и ротором при центральном положении ротора равен 120 мкм. Пусть линейная зона подвеса составляет 10% от зазора (в абсолютном выражении 12 мкм). При требуемой стабильности центрирования в 0,01 мкм необходим диапазон преобразования как минимум 12/0,01=1200, что соответствует 11 разрядной сетке. Увеличение требования к стабильности до 0,001 мкм (12/0,001=12000), требует 14 разрядной сетки.
Очевидно, что работа подвеса по тому или иному варианту (с задержкой на период или без нее) зависит от величины ![]() и возможностей микропроцессора. В настоящее время существуют высокоскоростные 11 – 14 разрядные микропроцессоры и многоканальные АЦП (как встроенные в процессор, так и в виде отдельных микросхем) с временами преобразования порядка 1 – 4 мкс. Однако возможность реализации того или иного варианта необходимо оценивать в каждом конкретном случае проектирования, исходя из стоимости микропроцессора, его энергопотребления и.т.д.
и возможностей микропроцессора. В настоящее время существуют высокоскоростные 11 – 14 разрядные микропроцессоры и многоканальные АЦП (как встроенные в процессор, так и в виде отдельных микросхем) с временами преобразования порядка 1 – 4 мкс. Однако возможность реализации того или иного варианта необходимо оценивать в каждом конкретном случае проектирования, исходя из стоимости микропроцессора, его энергопотребления и.т.д.
Для исследования процессов, происходящих в подвесе, и оптимизации его характеристик необходимо сформировать динамическую модель подвеса. Так как аналитический расчет многосвязных систем с ШИМ представляет значительные трудности, проведем моделирование подвеса в среде Simulink пакета Matlab 2006.
Центральным звеном модели, рис. 5, является блок вычисления сил 2. Он содержит подблоки вычисления (по аналитическим выражениям, приведенным в [4]) потенциала ротора и проекций сил ![]() . На вход блока поступают текущие значения координат центра ротора, потенциалы всех шести электродов (вычисляются в блоке 1 формирования ШИМ на основе законов управления [3]), и случайный заряд ротора
. На вход блока поступают текущие значения координат центра ротора, потенциалы всех шести электродов (вычисляются в блоке 1 формирования ШИМ на основе законов управления [3]), и случайный заряд ротора ![]() (при расчете принимается нулевым). Проекции пондеромоторных сил
(при расчете принимается нулевым). Проекции пондеромоторных сил ![]() с выхода блока вычисления сил суммируются с возмущающими воздействиями
с выхода блока вычисления сил суммируются с возмущающими воздействиями ![]() (блоки Step), два раза интегрируются и после прохождения через дискретные корректирующие звенья поступают на блок формирования потенциалов 1.
(блоки Step), два раза интегрируются и после прохождения через дискретные корректирующие звенья поступают на блок формирования потенциалов 1.
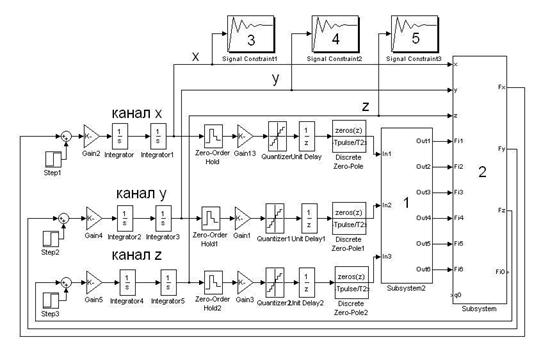
Рис. 5. Динамическая модель подвеса (1 – блок формирования ШИМ, 2 – блок вычисления сил, 3, 4, 5, - блоки оптимизации).
Если допустима работа подвеса со статической ошибкой, то в аналоговых и аналогово-импульсных схемах используют интегро-дифференцирующее корректирующее звено вида
 (1)
(1)
Для реализации астатического подвеса к интегро-дифференцирующему можно добавить изодромное звено
 (2)
(2)
Сопоставим корректирующему звену (1) его дискретный аналог
 (3)
(3)
Выражение (3) получено в условиях отсутствия временного запаздывания на период квантования. При наличии запаздывания коррекция принимает вид
 (4)
(4)
Для оптимизации параметров корректирующих звеньев использовался инструментальный пакет Nonlinear Control Design Blockset (NCD-Blockset). Он предоставляет в распоряжение проектировщика графический интерфейс для настройки параметров динамических объектов, обеспечивающих желаемое качество переходных процессов. В качестве средства для достижения указанной цели принимается оптимизационный подход, обеспечивающий минимизацию функции штрафа за нарушение динамических ограничений. Задание динамических ограничений осуществляется в визуальном режиме блоками SignalConstraint (блоки 3, 4, 5, рис. 5).
Прежде чем приступить к формированию динамических ограничений, обсудим ряд важных моментов. Несмотря на то, что большую часть времени подвес функционирует в малой окрестности положения равновесия, практически в любом подвесе имеется режим, при котором отклонение ротора от положения равновесия нельзя считать малым. Это режим всплытия ротора со страховочных упоров при первоначальном включении подвеса. Начальное отклонение ротора в этом режиме равно зазору в упорах ![]() , величина которого сопоставима с ротор-электродным зазором h. Если усиление в контуре стабилизации велико (линейная зона подвеса меньше
, величина которого сопоставима с ротор-электродным зазором h. Если усиление в контуре стабилизации велико (линейная зона подвеса меньше ![]() ), то при начальном всплытии ротора управляющий сигнал
), то при начальном всплытии ротора управляющий сигнал ![]() , рис. 2, переводит формирователи ШИМ в режим насыщения (происходит ограничение ресурса управления). Система управления подвесом должна быть спроектирована таким образом, чтобы после включения питания ротор плавно всплыл с упоров и застабилизировался в центральном положении. Это означает, что область возможных положений ротора
, рис. 2, переводит формирователи ШИМ в режим насыщения (происходит ограничение ресурса управления). Система управления подвесом должна быть спроектирована таким образом, чтобы после включения питания ротор плавно всплыл с упоров и застабилизировался в центральном положении. Это означает, что область возможных положений ротора ![]() должна быть областью притяжения к положению равновесия. Кроме того, подвес должен удерживать ротор, находящийся под действием возмущающих сил, с заданной точностью. Таким образом, динамические ограничения по каждому каналу подвеса можно представить в виде переходного процесса, рис. 6, состоящего из этапов всплытия ротора и отработки ступенчатой перегрузки.
должна быть областью притяжения к положению равновесия. Кроме того, подвес должен удерживать ротор, находящийся под действием возмущающих сил, с заданной точностью. Таким образом, динамические ограничения по каждому каналу подвеса можно представить в виде переходного процесса, рис. 6, состоящего из этапов всплытия ротора и отработки ступенчатой перегрузки.
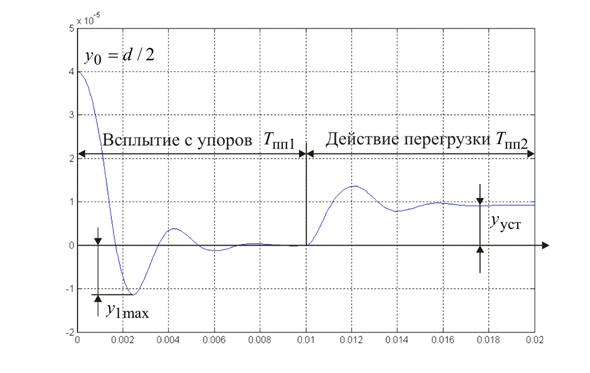
Рис. 6. Ограничения на переходный процесс
На базе этих ограничений NCD-Blockset автоматически генерирует задачу конечномерной оптимизации так, чтобы точка экстремума в пространстве настраиваемых параметров корректирующих звеньев соответствовала выполнению всех требований, предъявляемых к качеству процесса. Эта задача решается с привлечением специализированной процедуры квадратичного программирования из пакета Optimization Toolbox. Ход оптимизации контролируется с помощью отображения графика процесса и текущих значений минимизируемой функции.
Исследуем, каким образом частота квантования ШИМ ![]() влияет на устойчивость системы. В качестве примера рассмотрим сферический подвес с полым ротором, имеющий следующие характеристики: радиус ротора
влияет на устойчивость системы. В качестве примера рассмотрим сферический подвес с полым ротором, имеющий следующие характеристики: радиус ротора ![]() , зазор электрод- ротор при центральном положении ротора
, зазор электрод- ротор при центральном положении ротора ![]() , масса ротора
, масса ротора ![]() , угловой размер электрода
, угловой размер электрода ![]() , максимальная перегрузка
, максимальная перегрузка ![]() , линейная зона регулирования – 10% от зазора, зазор в упорах
, линейная зона регулирования – 10% от зазора, зазор в упорах ![]() . Расчет [4] статических силовых характеристик подвеса (при осреднении силовой характеристики на периоде ШИМ) показывает, что для обеспечения перегрузочной способности подвеса
. Расчет [4] статических силовых характеристик подвеса (при осреднении силовой характеристики на периоде ШИМ) показывает, что для обеспечения перегрузочной способности подвеса ![]() , необходимо установить амплитуды высоковольтных импульсов ШИМ на электродах осей y и z
, необходимо установить амплитуды высоковольтных импульсов ШИМ на электродах осей y и z![]() , а по оси x
, а по оси x![]() . Опорные потенциалы
. Опорные потенциалы ![]() по осям y и z выбраны отрицательными и по абсолютной величине в два раза меньше опорного потенциала
по осям y и z выбраны отрицательными и по абсолютной величине в два раза меньше опорного потенциала ![]() оси x . Это необходимо [3] для минимизации потенциала, индуцированного на роторе окружающими его электродами. Подвесы с нулевым потенциалом ротора обладают лучшими характеристиками, чем аналогичные подвесы, где меры по обнулению потенциала не приняты.
оси x . Это необходимо [3] для минимизации потенциала, индуцированного на роторе окружающими его электродами. Подвесы с нулевым потенциалом ротора обладают лучшими характеристиками, чем аналогичные подвесы, где меры по обнулению потенциала не приняты.
Установим сначала частоту ШИМ ![]() (верхний предел по технической реализации) и, используя имитационную модель подвеса, найдем оптимальные параметры
(верхний предел по технической реализации) и, используя имитационную модель подвеса, найдем оптимальные параметры ![]() дискретного корректирующего звена (3). Теперь будем уменьшать частоту квантования, проводя каждый раз процесс оптимизации. Таким образом, найдем минимальную частоту квантования, при которой переходный процесс еще удовлетворяет поставленным требованиям. Моделирование показало, что минимальная (нижняя граничная) частота квантования при коррекции (3) составляет величину
дискретного корректирующего звена (3). Теперь будем уменьшать частоту квантования, проводя каждый раз процесс оптимизации. Таким образом, найдем минимальную частоту квантования, при которой переходный процесс еще удовлетворяет поставленным требованиям. Моделирование показало, что минимальная (нижняя граничная) частота квантования при коррекции (3) составляет величину ![]() . Естественно предположить, что при учете дополнительного временного запаздывания на период (4) нижняя граница сдвинется в область более высоких частот квантования. Это подтверждается моделированием, оптимизация достижима при частотах выше 8 кГц, что в два раза больше, чем без запаздывания.
. Естественно предположить, что при учете дополнительного временного запаздывания на период (4) нижняя граница сдвинется в область более высоких частот квантования. Это подтверждается моделированием, оптимизация достижима при частотах выше 8 кГц, что в два раза больше, чем без запаздывания.
Исследуем теперь астатический вариант коррекции (2), дискретный аналог которого найдем как

Моделирование позволило определить нижнюю границу частоты ШИМ:
- ![]() без временного запаздывания;
без временного запаздывания;
- ![]() с учетом запаздывания.
с учетом запаздывания.
Астатический подвес, как и следовало ожидать, более критичен к выбору частоты квантования.
Моделирование, проведенное при других типоразмерах роторов, позволяет утверждать, что реализация цифровых подвесов для полых роторов больших диаметров возможна как при статическом, так и при астатическом регулировании.
Дополнительные исследования показывают, что в подвесах со сплошными роторами малых диаметров цифровая коррекция труднореализуема, если вообще возможна. Это связано со значительно более высокими собственными частотами роторов. Так, например, для бериллиевого ротора с радиусом ![]() , зазором
, зазором ![]() , массой
, массой ![]() , максимальной перегрузкой
, максимальной перегрузкой ![]() ,
, ![]() , собственная частота ротора почти в четыре раза выше, чем для рассмотренного ранее подвеса с полым ротором. Для таких параметров объекта стабилизации требуется установить частоту ШИМ свыше 20 кГц, что практически нереализуемо. Здесь остается возможность создания импульсных подвесов на операционных усилителях с аналоговой коррекцией в виде интегро-дифференцирующего звена.
, собственная частота ротора почти в четыре раза выше, чем для рассмотренного ранее подвеса с полым ротором. Для таких параметров объекта стабилизации требуется установить частоту ШИМ свыше 20 кГц, что практически нереализуемо. Здесь остается возможность создания импульсных подвесов на операционных усилителях с аналоговой коррекцией в виде интегро-дифференцирующего звена.
Для подвесов цилиндрических роторов в жидкости технические аспекты реализации дискретной коррекции затруднений не представляют, так как собственные частоты таких роторов составляют десятые доли герца.
СПИСОК ЛИТЕРАТУРЫ
1. А. П. Буравлев, В. М. Кузин. Теоретические и экспериментальные исследования силовых и точностных характеристик подвеса бескарданного электростатического гироскопа//Гироскопия и навигация.-2006.-№4.-С.83.
2. А. с. 1331219 СССР, МКИ G01C 19/24. Способ центрирования ротора электростатического гироскопа / С. А. Васюков, Г. Ф. Дробышев, Н. А. Орлов (СССР). № 3931438/40-23; 1987.
3. С. А. Васюков, Г. Ф. Дробышев. Алгоритмы управления потенциалами на электродах электростатического подвеса//Вестник МГТУ им. Н. Э. Баумана. Сер. Приборостроение.-2007.- №2.-С.69-81.
4. С. А. Васюков. О влиянии законов управления потенциалами на силовые характеристики сферического электростатического подвеса//Наука и образование. Инженерное образование. Электронный журнал.- www.techno.edu.ru.- октябрь, 2007, 25 С.
Публикации с ключевыми словами: электростатический подвес, потенциал ротора, случайный заряд
Публикации со словами: электростатический подвес, потенциал ротора, случайный заряд
Смотри также:
- 77-30569/283810 Способы компенсации смещения нуля емкостного датчика электростатического подвеса
- 77-48211/618897 Схемотехника электростатических подвесов на переменном токе и особенности их применения в приборах систем управления движением
- 77-48211/620477 Схемотехника и особенности применения импульсных электростатических подвесов в приборах систем управления движением
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||