научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 10, октябрь 2011
УДК.629.127.
МГТУ им. Н.Э. Баумана
sseverov @ mail.ru
В данном сообщении, предполагающем последующее развитие, не ставится задача и не преследуется цель дать полный обзор известных инновационных подходов к инженерному образованию в Российской федерации и за рубежом. Здесь вводится и обсуждается, в основном, одна крупная, распространенная за рубежом, но практически неизвестная в нашей стране форма международных студенческих соревнований подводных роботов типа ROV – RemotelyOperatedVehicle. В ряде технологически развитых и интенсивно развивающихся стран БРИК роботы указанного ROV–типа ежегодно разрабатываются проектными командами различных университетов, морских военных академий, колледжей и высших школ. Для справки: в отечественных публикациях в качестве адекватного эквивалента акронима ROVиспользуются: ППА – привязной подводный аппарат; ТПА – телеуправляемый подводный аппарат; ТНПА – телеуправляемый необитаемый подводный аппарат и др. Поскольку всякие длинноты провоцируют сокращения, в данной публикации будет использоваться более короткий термин – гидробот. Как известно из открытого информационного ресурса www.marinetech.org, указанные соревнования проводит МАТЕС –MarineAdvancedTechnologyEducationCenter – Центр Морских перспективных образовательных технологий. Концептуальные основы проведения соревнований МАТЕС открыты для свободного доступа и обсуждения.
Нельзя не согласиться с тем, что в Российской федерации рынок гидроботов пока ещё не сложился [1]. Однако, из сопоставления числа типоразмеров, по мировым каталогам 2009, 2010 и 2011 гг. [2] и количества ежегодно производимых в мире подводных аппаратов следует, что в целом подводная робототехника и морская индустрия находятся на подъеме.
Тема международных соревнований гидроботов МАТЕС затрагивалась на предыдущих профессиональных конференциях по современным методам и средствам океанологических исследований МСОИ в [1], [3] и [4], а также в других сообщениях и докладах автора. Отмечалось, что более чем десятилетняя практика проведения международных соревнований студенческих ROV-гидроботов заслуживает пристального внимания и анализа отечественными специалистами в области высшего профессионального инженерного образования.

Фото 1. Команда МГТУ и команда ДВГТУ – студенты России, участники чемпионата МАТЕС ROV-гидроботов June 16 - 18, 2011 NASANBL - NeutralBuoyancyLaboratory
К сожалению, в международных соревнованиях МАТЕС пока принимают участие команды только двух университетов России: ДВГТУ и МГТУ, Фото 1. В процессе организационной борьбы за создание команды «Гидронавтика» МГТУ в 2008-2009 гг. энтузиасты МГТУ опирались на опыт ДВГТУ.
В соответствии с годичным жизненным циклом указанного академического явления, за время после соревнований МАТЕС-2009, прошли два мировых чемпионата студенческих гидроботов: МАТЕС-2010 в г. Хило и МАТЕС-2011 в г. Хьюстоне, США.
Автор настоящего сообщения с 2008 г., по собственной инициативе и далее при поддержке кафедры «Подводные роботы и аппараты», принимает непосредственное участие в подготовке команды «Гидронавтика-ROV» МГТУ им. Н.Э. Баумана к соревнованиям МАТЕС и в консультационно-методическом обеспечении участия студенческой команды в соревнованиях. Автор выезжал, вместе со студенческой командой МГТУ на соревнования, сопровождал её во всех видах проектной деятельности в качестве ментора – наставника, а также наблюдал за работой команд ведущих зарубежных университетов.
10THAnnualMATEС InternationalExplorerclass 10-Й Международный студенческий MATEконкурс гидророботов Explorerкласса
June 16 - 18, 2011 NASANBL - NeutralBuoyancyLaboratory Лаборатория нейтральной плавучести Космического центра NASA
egistration. № |
City |
STATE |
Universit Team Name (if applicable) | Final Mission Score* | Technical report** |
Engineering*** |
Poster**** |
| FINAL RANKING |
TOTAL | Финальный рейтинт | ||||||||
20 | Sacramento | CA | Jesuit High School | 307.1 | 77.3 | 71.00 | 36 | 491.4 | 1 |
12 | West Lafayette | IN | Purdue University | 303.58 | 74.4 | 75.33 | 34.5 | 487.8 | 2 |
16 | Albany | OR | Linn-Benton Community College | 301.35 | 74.5 | 77.83 | 28 | 481.7 | 3 |
6 | Vladivostok | Russia | Far Eastern Federal University | 298.05 | 62.8 | 68.33 | 29 | 458.2 | 4 |
19 | St. John's | NL | Memorial University | 240 | 78.6 | 79.50 | 37 | 435.1 | 5 |
23 | SeaTech 4 | H Club | SeaTech 4-H Club - Skagit Valley 4-H | 215 | 80.3 | 71.67 | 29 | 396.0 | 6 |
4 | Halifax | NS | Dalhousie University | 185 | 79.0 | 80.67 | 33 | 377.7 | 7 |
14 | Savannah | GA | Georgia Tech Savannah Robotics | 155 | 67.7 | 69.00 | 21.5 | 313.2 | 8 |
13 | Hong Kong | China | Hong Kong University of Science and Technology | 135 | 65.2 | 80.50 | 22 | 302.7 | 9 |
26 | Moscow | Russia | Bauman Moscow State Technical University | 155 | 48.0 | 71.00 | 20.5 | 294.5 | 10 |
2 | Manahawkin | NJ | Marine Academy of Technology and Environmental Science | 120 | 71.0 | 60.00 | 30.5 | 281.5 | 11 |
10 | Dartmouth | NS | Nova Scotia Community College | 140 | 55.8 | 59.67 | 24 | 279.5 | 12 |
11 | Aberdeen | UNITED KINGDOM | Robert Gordon University | 100 | 73.2 | 59.67 | 25 | 257.9 | 13 |
5 | Del Rey Oak | CA | Monterey Peninsula College | 45 | 66.4 | 55.33 | 35 | 201.7 | 14 |
21 | Hilo | HI | University of Hawaii at Hilo | 35 | 52.0 | 75.00 | 22.5 | 184.5 | 15 |
15 | Tempe | AZ | NASA Space Grant Robotics at Arizona State University | 20 | 64.0 | 70.00 | 23.5 | 177.5 | 16 |
1 | North Dartmouth | MA | University of Massachusetts Dartmouth | 20 | 59.9 | 69.50 | 27 | 176.4 | 17 |
7 | Lewes | DE | Cape Henlopen High School | 20 | 62.0 | 66.33 | 20.5 | 168.8 | 18 |
22 | Fall River | MA | Bristol Community College | 20 | 48.8 | 70.50 | 27 | 166.3 | 19 |
17 | Bangalore | INDIA | BangaloreRobotics | 20 | 71.5 | 39.33 | 14.5 | 145.3 | 20 |
24 | Astoria | OR | Clatsop Community College | 20 | 51.8 | 60.67 | 7.3 | 139.8 | 21 |
3 | Hong Kong | CHINA | City University Of Hong Kong | 0 | 57.2 | 55.33 | 23.5 | 136.0 | 22 |
8 | Prescott | AZ | Yavapai College Robotics | 20 | 57.2 | 35.00 | 16 | 128.2 | 23 |
9 | La Marque | TX | University of Houston | 20 | 37.8 | 51.00 | 11.5 | 120.3 | 24 |
25 | Alexandria | EGYPT | Arab Academy for Science Technology & Maritime Transport | 20 | 26.6 | 52.17 | 0 | 98.8 | 25 |
18 | College Station | TX | ASME-Tech, Texas A&M University Student Chapter | 0 | 68.8 | 0.00 | 0 | 68.8 | 26 |
*higher score out of two mission attempts **average of four scores ***average of three scores ****average of multiple scores
Автор сообщения приходит к убеждению, что образовательная технология МАТЕС, ориентированная на конкурентную защиту результатов в открытом соревновании ведущих университетов продуктивна, как форма повышения качества профессиональной подготовки российских инженеров подводной робототехники до мирового уровня.
Знакомство с сущностью соревнований МАТЕС лучше начать с конца, с анализа данных, представленных в финальной таблице баллов, оценок и рейтингов. Конкретные результаты любого конкурса, в том числе последнего МАТЕСompetition-2011, каждый из университетов, участвовавших в них, может извлечь из официальной таблицы на сайте www.marinetech.orgв виде своих баллов, оценок и рейтингов, как по любым отдельным номинациям, так и в суммарном зачете,.
В представленной таблице можно видеть, что в конкурсе-2011 приняли участие команды 26 университетов, академий и колледжей, готовящих специалистов подводной робототехники, в том числе команда МГТУ им. Н.Э. Баумана и команда ДВГТУ – Дальневосточного государственного технического университета; в настоящее время ДВФУ - Дальневосточный Федеральный университет. Число участников соревнований 26 – это результат региональных соревнований и предварительного отбора. Некоторые команды сняты с соревнований. У других команд аппараты задержались на дальних путях доставки. Число участников 26 относится только к классу продвинутых аппаратов класса EXPLORER - ИССЛЕДОВАТЕЛЬ. Кроме аппаратов EXPLORER в конкурсе принимали участие примерно столько же аппаратов класса RANGER, ориентированных на выполнение более легких подводных работ. По правилам МАТЕС все команды - претенденты допускаются сначала к соревнованиям RANGER, а затем к региональным соревнованиям EXPLORER. Далее две, первая и вторая по рангу, региональные команды-победители направляются на международные соревнования МАТЕС. Поскольку в России пока всего две команды – МГТУ и ДВГТУ, они обе, после демонстрации в бассейнах и оценки работоспособности и эффективности гидроботов инспекторами МАТЕС, сразу допускаются к международным соревнованиям уровня EXPLORER без регионального конкурсного отбора.
Из таблицы (крайний левый столбец-боковик), следует, что команда BaumanMoscowStateTechnicalUniversity - Бауманского Московского Государственного Технического Университета зарегистрирована 15.06.2011 в оргкомитете соревнований под № 26. Команда студентов МГТУ закончила соревнования МАТЕС, с суммой оценок 294,5 баллов по всем видам результатов. Команда на 10-м месте (крайний правый столбец). В оголовке таблицы можно видеть все номинации, оценки, максимум баллов и рейтинг команды МГТУ в каждой из номинаций:
· FinalMission 155/300 – финал работ подводной миссии – 10 место
· TechnicalReport 48/80- технический отчет о разработке аппарата - 8 место
· EngineeringEvaluation 71/80 оценка инженерных решений - 10 место
· PosterDisplay 20,5/40 – стендовый дизайн- плакат - 19 место
· TOTALScore*294,5/500-суммарная оценка по всем номинациям - 23 место.
С такими результатами команда МГТУ оставила за собой 16 команд, в том числе команды Великобритании, Индии, Китая и Египта. Значительно лучше результаты у команды ДВФУ – Дальневосточного федерального университета, занявшей по сумме оценок 4-е место. Для справки: в прошлом голу, на международных соревнованиях МАТЕС – 2010 команда ДВГТУ/ДВФУ заняла первое место и стала чемпионом. К этому достижению команда ДВФУ шла 3 года: 2008 (8-е место); 2009 (4-е место); 2010 (1-е место). Команде МГТУ было разрешено подключиться к соревнования МАТЕС только в 2010 г.
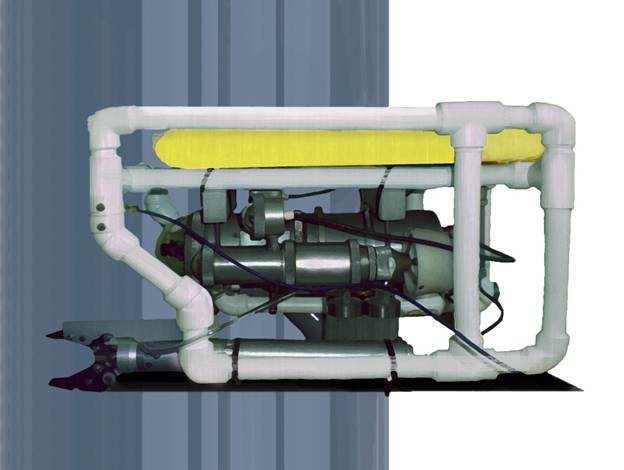
Фото 2. Гидробот «Акватор», предназначенный для ликвидации последствий воздействия подводного вулкана на донную океанологическую обсерваторию Гавайев
Таким образом, ежегодно, начиная с июня 2001 года, Центр Морских Перспективных Образовательных Технологий MATEС проводит международные студенческие соревнования в области подводной робототехники MATE-ROV Competitions. Соревнования проводятся каждый раз в другом бассейне, в другом университете, в другом городе, и иногда даже в другой стране, но чаще в США. Каждый раз на дне бассейна специалисты чемпионата МАТЕС устанавливают новый комплекс донного оборудования и приспособлений, физически моделирующих обстановку одной из наиболее значительных подводных катастроф года, прошедшего с момента последних соревнований МАТЕС. Фактически на дне бассейна устанавливаются объекты и оборудование, физически воспроизводящие ситуацию, соответствующую условиям ликвидации последствий наиболее известной подводной катастрофы прошедшего года с помощью ROV - гидроботов. Моделируемыми ситуациями могут быть: затопление подводной лодки в Атлантике и помощь в спасании её экипажа (2009); аварийное погребение донной океанологической станции подводным вулканом на Гавайях и её восстановление (2010); взрыв и обрушение буровой платформы на дно Мексиканского залива с образованием фонтанирующей нефтяной скважины и её герметизацией (2011). Каждый раз студенческим командам предлагается разработать свой гидробот для ликвидации последствий воспроизводимой подводной катастрофы, прибыть на соревнования и в конкурентной обстановке продемонстрировать эффективность своего проектно-технического решения. Поэтому, ежегодно до 60 команд-участников высших школ, колледжей и университетов со всего мира встречаются, чтобы продемонстрировать, в идентичных тестовых условиях, как их подводные аппараты справляются с решением актуальных проблем мировой океанотехники. Всё происходящее в бассейне оперативно записывается на все носители видео- и аудиоинформации. Информация, сопровождаемая комментарием специалистов, постоянно транслируется в режиме реального времени по каналам национального TV.
Результаты выполнения заданий подводной миссии (MS), технического отчета (TR), инженерного оценивания (EE) и дисплейного постера (PD) оцениваются по лучшей из двух попыток выполнения, с привлечением соответствнно 2-х, 3-х, 4-х и более независимых экспертов. Протоколы судей рассылаются по университетам экспресс-почтой, вместе с компакт-дисками видеозаписи. Инновационные элементы рассматриваемой образовательной технологии МАТЕС мы проанализируем отдельно в сопоставлении обычных академических и конкурсных проектов. Также отдельно рассмотрим и оценим методику многофкторного, многокритериального и, многоэкспертного ранжирования команд-участниц чемпионата.
Здесь лишь заметим, что столь значительное явление, как МАТЕС, не могло остаться незамеченным для кафедры подводной робототехники МГТУ им. Н. Э. Баумана. Начиная с 2008 года, под руководством профессора кафедры СМ11 С.П. Северова, автора сообщения, в инициативном порядке, с преодолением косного противодействия, была сформирована команда "Гидронавтика", впервые принявшая участие в MATEC-2010 с гидроботом «Акватор», Фото 2, разработанным, исследованным и испытанным на протяжении одного годичного цикла.
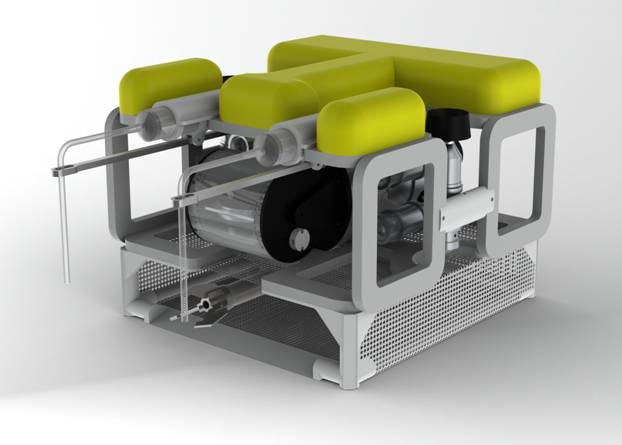
Фото 3. Пространственая 3D-модель конкурсного аппарат «АКВАТОР II» для соревнований МАТЕС ROV- 2011 в NBLDSCNASA, Houston, USA
Гидробот «АКВАТОР», Фото 2, предназначался для физического моделирования ликвидации последствий извержения подводного вулкана на подводную океанологическую обсерваторию в акватории архипелага Гавайи. Гидробот «АКВАТОР», Фото 2, созданный в 2010 году, использовался в соревнованиях МАТЕС 2010. Столь высокий темп одногодичной разработки студентам-членам команды «Гидронавтика ROV» МГТУ им. Н.Э. Баумана удается поддерживать благодаря использованию ППП (пакетов прикладных программ) информационно технологической автоматизации: CAD; CAM; CAE; CASE и CALS, а также 3D-геометрических моделей аппарата и 3D-принтеров для изготовления твердотельных конструкционных элементов. В соревнованиях МАТЕС-2011 команда выступила с новым аппаратом «АКВАТОР II», предназначенным для устранения аварии на модели морской буровой платформы DeepWaterHorizon. Геометрическую 3D - модель аппарата «АКВАТОР II» можно видеть на Фото 3. Реальный твердотельный, изготовленный в конструктивном материале аппарат, с помощью 3D-принтера, можно видеть на Фото 4.
Как уже отмечалось, в соревнованиях МАТЕС участвуют два класса роботов: RANGER–упрощенные роботы малых глубин и продвинутые в своем развитии роботы EXPLORER. Последние способны, после соответствующей доработки, выполнять усложнённые подводно-технические задания на больших глубинах. Команда «Гидронавтика» МГТУ ориентируется на класс EXPLORER.

Фото 4. Гидробот «АКВАТОР II» в состоянии готовности к работе на донном полигоне опытового бассейна NBLNASA
Можно аргументированно показать, что концепция МАТЕС базируется на современных представлениях мирового стандарта управления проектами [6]. Общеизвестно, что проект – создание уникального продукта за ограниченное время при определенных ресурсах. В соответствии с методологией проектного подхода, основными требованиями к представленным гидроботам являются уникальность гидробота и образовательная ценность процессов его создания. Гидробот, представленный на суд экспертов, полностью разрабатывается под заданную подводную миссию командой-участником в течение одного года, не является серийным и не может быть использован повторно в последующих МАТЕС соревнованиях.
Конкурсный аппарат имеет определенные ограничения по мощности, параметрам тока питания, безопасности и эргономике. В остальном, правила ничем не ограничивают креативную свободу. Подобная политика позволяет участникам проверить ряд интересных инженерных решений, делая каждый аппарат, а, порой, даже и поход к выполнению аппаратом подводных миссий, уникальным и оригинальным. MATEС, однако, накладывает строгие временные рамки: за год между соревновательными неделями команда должна спроектировать, изготовить, запрограммировать, отладить и испытать гидробот, а так же обучить пилотов эффективно им управлять и выполнять технические задания миссии. Дополнительную сложность создает еще и то обстоятельство, что полный перечень рабочих заданий подводной миссии объявляется лишь за 6 месяцев до выхода команды на стартовую площадку бассейна.
Соответственно, напрашивается решение: декомпозировать процессы создания гидробота - носителя и специального навесного рабочего оборудования. Все первое полугодие команда МГТУ трудится над созданием универсальной и быстрой платформы - носителя, которая впоследствии будет оснащена всем необходимым для работы в заданных судейской коллегией условиях.
«АКВАТОР» (Фото 2) - телеуправляемый подводный аппарат малых габаритов весом 6 кг, был разработан студентами к соревнованиям MATEC-2010. Аппарат оснащён манипулятором, датчиком температуры, сонаром и гидроимпеллером. Он способен выполнять множество различных операций: захватывать и перемещать подводные объекты, измерять температуру воды, брать пробы бионалета с поверхности подводного вулкана и разыскивать донные источники звука.
В основу гидробота - носителя заложены движители серийного подводного аппарата «ГНОМ», известного своими малыми габаритами и высокой манёвренностью. Заключив систему в новую раму и доработав систему кабельного электропитания, а также бортовую электронику робота, команда оснастила аппарат приспособлениями собственной разработки для выполнения миссии МАТЕС. Вскоре прошли первые, успешные испытания аппарата «АКВАТОР» в гидроканале Центрального Аэрогидродинамического Института.
Однако далее не все пошло так гладко как начиналось. Во время транспортировки аппарата на Гавайи, к месту проведения соревнований, один из гребных винтов оказался потерянным. Поиск идентичного латунного винта на месте не дал результатов. Пришлось ставить аналогичный полимерный. Срочная перекомпоновка аппарата не помогла. Наблюдался заметный раздрай упоров винта, который не смогла парировать система управления. Первый «АКВАТОР» сумел погрузиться в тёплые воды гавайского бассейна, но, несмотря на все попытки наших пилотов-операторов, аппарат не выполнил задания подводной миссии.
Разработка аппарата «АКВАТОР» стала боевым крещением для команды МГТУ. Получив ценный опыт, бауманцы включились в подготовку к соревнованиям 2011 г. в Хьюстоне.
Ранее, в ходе соревнований 2010 года было выявлено, что «АКВАТОР» явно не дотягивает до своих конкурентов по грузоподъемности и мощностным характеристикам. Это непосредственно образом повлияло на конструкцию аппарата 2011 года, и аппарат проектировался уже в следующей более тяжелой весовой категории.
Масса «АКВАТОРА II» (Фото 4) составляет 24 кг. Свой гидробот команда оснастила манипулятором, датчиком глубины, устройством для забора проб жидкости на глубине и трал-сетью для сбора образцов морской фауны. В ходе выполнения заданий миссии предполагалось использовать также некоторые дополнительные приспособления, удерживаемые схватом руки бортового робота - манипулятора.
В конструкции «АКВАТОРА II», Фото 4, не обошлось без использования готовых узлов. Гидробот был укомплектован манипулятором и шестью движителями, типа используемых на подводной подвижной видеокамере подводного аппарата «ГНОМ». Однако, управление устройствами, полученными в результате поставок, было реализовано на спроектированной и изготовленной студентами электронике с помощью программ, написанных программистами команды.
Из-за возросшей нагрузки, студентам оказалось не просто уложиться в срок, и они часто засиживались в лабораториях до закрытия университета. Тем не менее, аппарат «АКВАТОР II» был закончен до истечения DEADLINE– срока и за три дня до вылета успешно прошёл испытания в бассейне Института Океанологии РАН. На соревнования МАТЕС-2011 в лабораторию нейтральной плавучести Космического центра в Хьюстоне аппарат «АКВАТОР II» был представлен в полной готовности к входному тестированию С «АКВАТОРОМ-2» бауманцы заняли 10-е место в общем зачёте из 26 команд. Большая часть баллов было получено благодаря хорошей управляемости аппарата. Значительная часть баллов потеряна «на пустом месте», на языковом барьере и неумении оформлять проектную документалистику. Не обошлось, конечно, и без непредвиденных обстоятельств и ситуаций, но для этого рассмотрения требуется отдельный раздел «Риски студенческого творческого проекта и оптимальное реагирование на риски».
Фото 5. Гидробот «Акватор III» в лаборатории: сборка конструктивно-силового основания
Тестирование было строгим, но результативно позитивным. Актиивных защитников гидробота «АКВАТОР II» можно видеть на Фото 5.
Команда «Гидронавтика ROV», с началом нового учебного года, с обновленным составом команды, за счет включения энтузиастов младших курсов, входит в новый годичный жизненный цикл работ 2012 над новым аппаратом «Акватор III». Успешные наработки прошлого года воспроизводятся, проблемные ставятся на исследование. Среди них – проект собственных винтомоторных агрегатов для нового гидробота, система стабилизации типичных состояний аппарата, замысел «трёхмерного зрения» и др.
В студенческих головах вращаются новые проекты достижения попутных уникальных результатов, но всего лишь меньше года до главного результата на чемпионате МАТЕС в Орландо. Команда надеется, что все замыслы рано или поздно осуществятся. В обычном представлении – чем раньше, тем лучше. Но в проектном представлении конкурса МАТЕС, лучше – значит своевременно. «Goodluck!», обычно говорят организаторы соревнований МАТЕС. Будем полагать удачей своевременное достижении высокой чемпионской цели конкурса.
Выводы:
1. Требуется анализ влияния конкурсных проектов международного уровня МАТЕС ROVна качество профессиональной подготовки в России будущих инженеров в области подводной робототехники вообще и в МГТУ в частности.
2. Актуально выявление концептуальных основ организации соревнований МАТЕС, как формы развития креативных профессиональных качеств инженера.
3. Целесообразна систематизация методических особенностей МАТЕС, предполагающая использование продвинутых стандартов управления проектами мирового уровня типа РМВОК-2008.
4. Внедрение в систему инженерного высшего профессионального образования проектной методологи обучения МАТЕС требует процессно- целесообразного подхода к управлению образовательными сервисами на основе современных представлений ITIL– библиотеки инфраструктур и ITSM – сервисного менеджмента IТ систем.
Результаты, полученные автором на основании теоретических и экспериментальных данных, в том числе базирующиеся на опыте непосредственного участия в процессах ТЕС, представляются автором в последующих публикациях в http://technomag.ru.
Литература
1. Вельтищев В.В., Челышев В.А. ТЕЛЕУПРАВЛЯЕМЫЕ ПОДВОДНЫЕ АППАРАТЫ В РОССИИ: СОВРЕМЕННОЕ СОСТОЯНИЕ И ПЕРСПЕКТИВЫ РАЗВИТИЯ. В тр. Х Межд. Научно-технической конференции Современные методы и средcтва океанологических исследований. Изд. ИОРАН, М.: 2007 – с. 89
2. Remotely Operated Vehicles of the World 2010/2011. London Eng. - Huston USA. – 458 pp.
3. Северов С.П., Розман Б.Я., Елкин А.В.и др. МАЛЫЕ ПОДВОДНЫЕ АППАРАТЫ В ОКЕАНОТЕХНИКЕ В тр. VIII Межд. научно-технической конференции Современные методы и средcтва океанологических исследований. Изд. ИОРАН, М.: 2009 – с. 201.
4. Северов С.П., Розман Б.Я., Шерстов Е.А. МЕЖДУНАРОДНЫЕ СОРЕВНОВАНИЯ ROV. Северов С.П., Розман Б.Я., Ёлкин А.В. и др. В тр. ХI Межд. Научно-технической конференции Современные методы и средcтва океанологических исследований. Изд. ИОРАН, М.: 2009 – с. 135
5. Underwater Robotics: Science, Design & Fabrication. Steven W. Moore, Harry Bohm, Vickie Jensen. Marine Advanced Technology Education Center (MATEC). 2010, Monterey, CA, USA - 769 pp.
6. A Guide to the Project Management Body of Knowledge (PMBOK Guide).The Fourth Edition (2008) of the American National Standard (ANSI/PMI 99-001-2008).
Публикации с ключевыми словами: технология, робот, инновация, робототехника, высшее образование, инженер, инженерная океанология, морская индустрия, океанотехника, подводная миссия, подводные катастрофы, подводный аппарат
Публикации со словами: технология, робот, инновация, робототехника, высшее образование, инженер, инженерная океанология, морская индустрия, океанотехника, подводная миссия, подводные катастрофы, подводный аппарат
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||